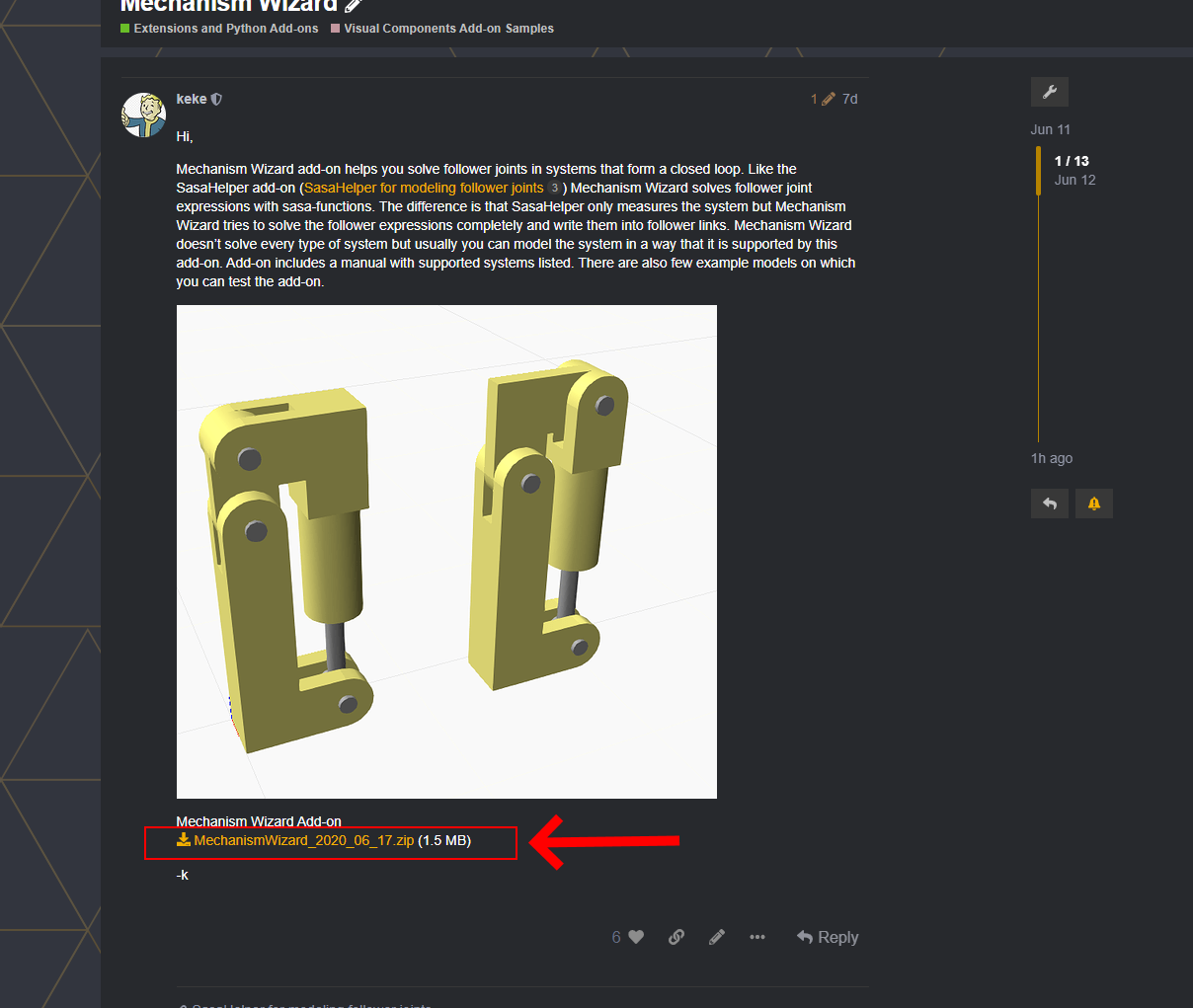
Mechanism Wizard add-on helps you solve follower joints in systems that form a closed loop. Like the SasaHelper add-on (SasaHelper for modeling follower joints) Mechanism Wizard solves follower joint expressions with sasa-functions. The difference is that SasaHelper only measures the system but Mechanism Wizard tries to solve the follower expressions completely and write them into follower links. Mechanism Wizard doesn’t solve every type of system but usually you can model the system in a way that it is supported by this add-on. Add-on includes a manual with supported systems listed. There are also few example models on which you can test the add-on.
Is there a change you could also post a video demonstrating the “MechanismWizard Add-on” I am not seeing the add-on. or is the “SasaHelper” needed first? Thank you both are great tools by the way!
There’s a pdf manual included in this add-on. But I might do a video tutorial at some point too. This add-on doesn’t need SasaHelper but they are just trying to solve same problems in different ways.
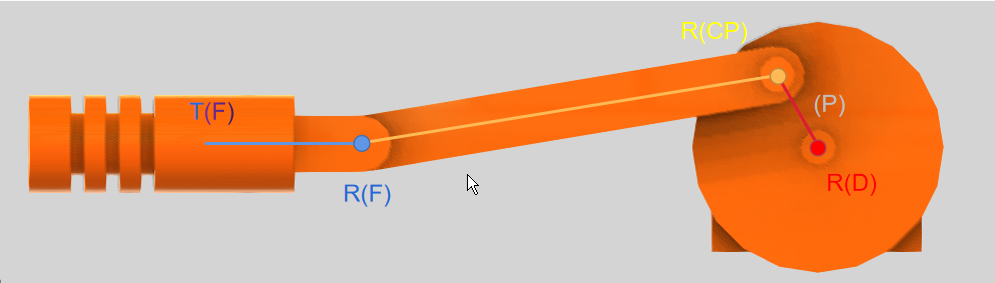
That type of a piston mechanism is a system that is not supported by this add-on.
Fortunately the trigonometry is not that hard to be solved manually for this. Check out this parametric piston component and the follower expressions in it.
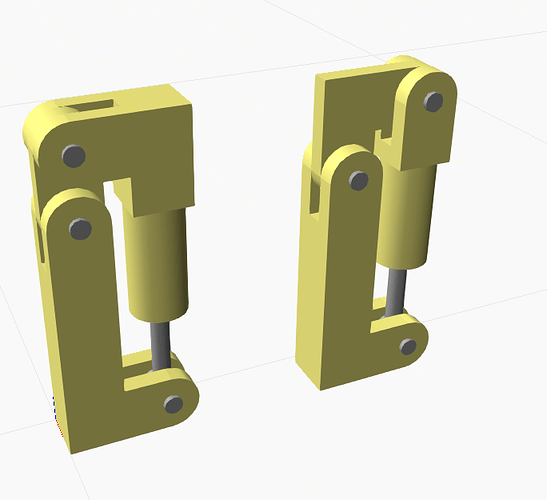
It wasn’t supported but I updated the add-on to include few new system types. Download the new version (from original post) and then you can model the driver and follower links so that the system looks like this:
I modeled the links for you so check out the attached model. Use the new add-on for that, select the link chains and connection point and solve followers and mechanism should work then.
Hi keke,
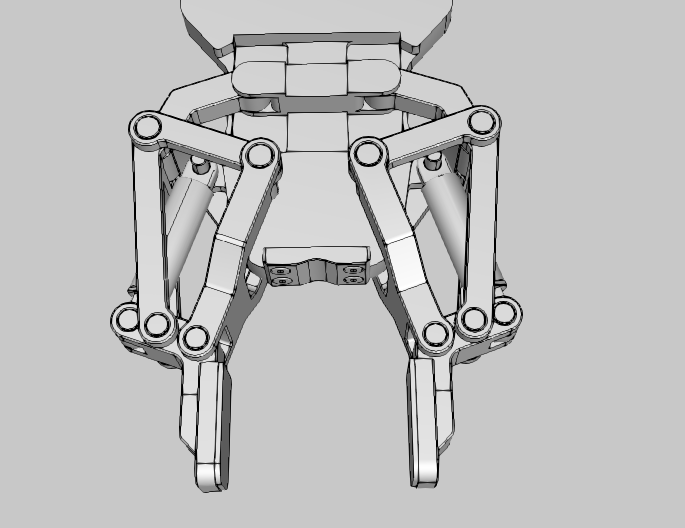
Is this add-on suitable for this situation? I tried to do it once,but it still seemed to have a problem,Could you help me ? gripper.vcmx (1.4 MB)
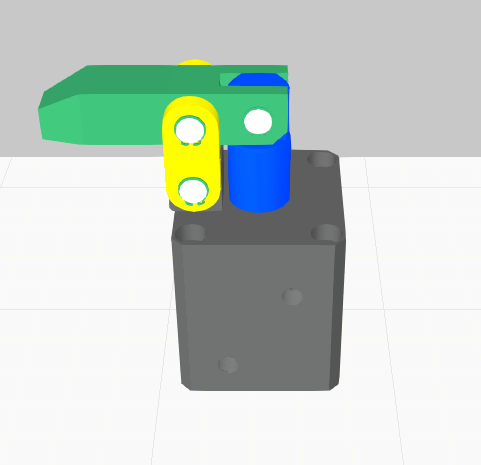
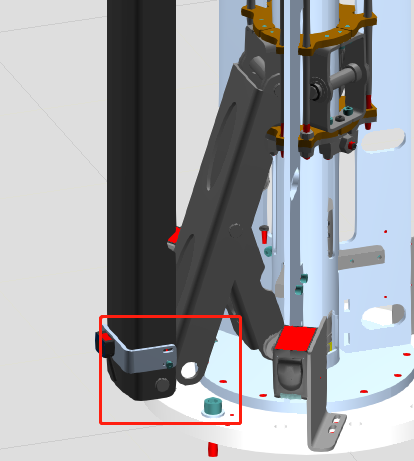
You already have a solution for that joint. Check the picture below. There are two coinciding angles. One you already have as a functional follower axis and you just need to create a similar follower link for the other. I attach the modified gripper for reference but before you check it see if you can create it by yourself.
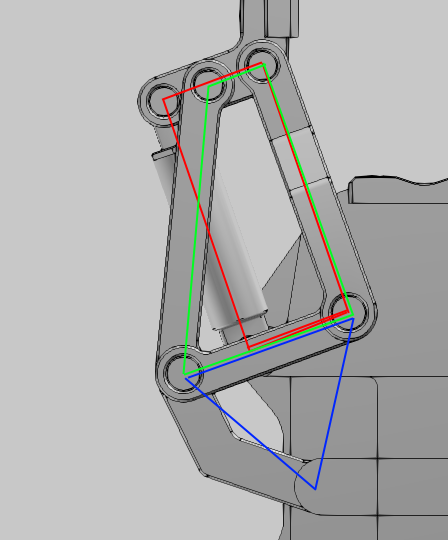
All those loops are connected so this makes modeling them quite difficult. But I would start by modeling the red loop first. I select driver on that loop and two followers on the loop are quite easy to solve. Then I move to green loop. This one is more difficult to solve because its sides are no longer symmetric like on red loop. But I can use sasa-functions to solve followers on it. There’s this add-on Sasa-helper (SasaHelper for modeling follower joints) that can be used to measure the system and get pre-filled sasa-functions printed automatically. The following video capture shows how I modeled red and green loops.
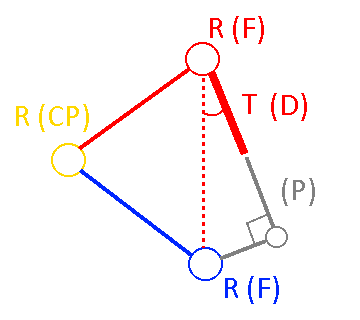
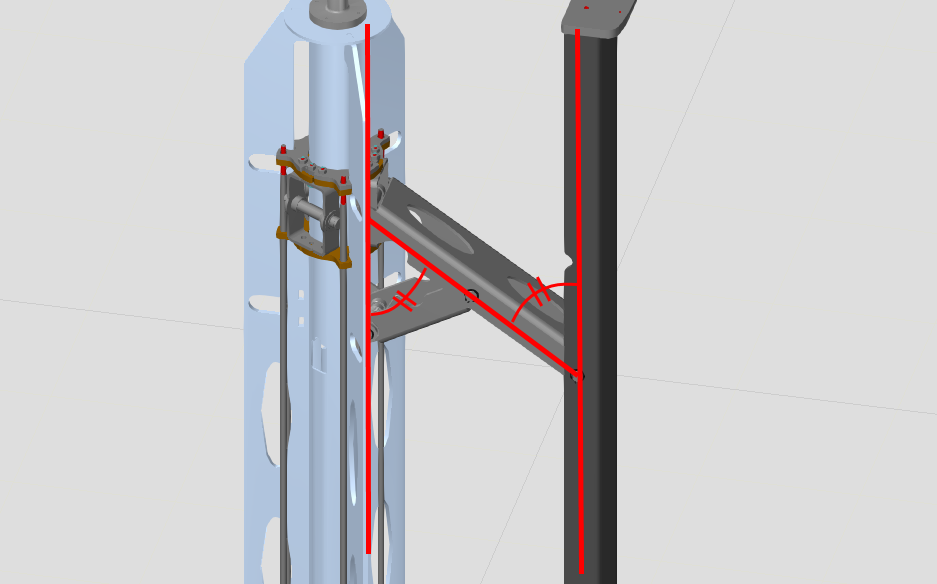
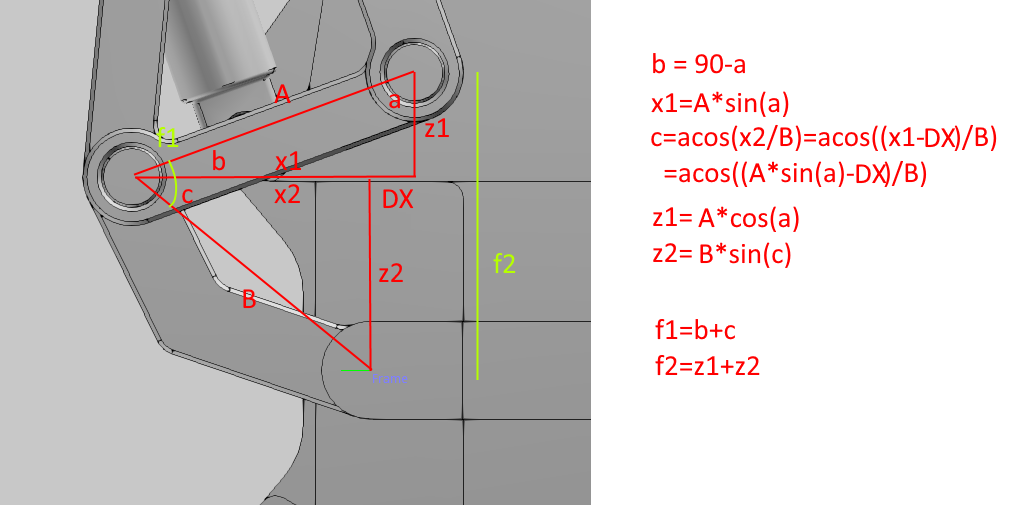
For last blue loop you kind of need to dive into the deep end and solve it with trigonometry. In the picture below you see one way to solve blue loop.
Lengths A, B and DX can be measured. Angle a is the driver in this case. The rest of the angles and lengths can be solved with trigonometry. Really the difficulty here comes from placing previous results into the expressions. This is 3rd consequential loop so the expression for driver a is already pretty lengthy and the end results f1 and f2 get really long.
The final result is in the attachement. I only solved one side so see if you can replicate it on the other. 夹爪模型.vcmx (438.6 KB)