cylinder.vcmx (492.9 KB)
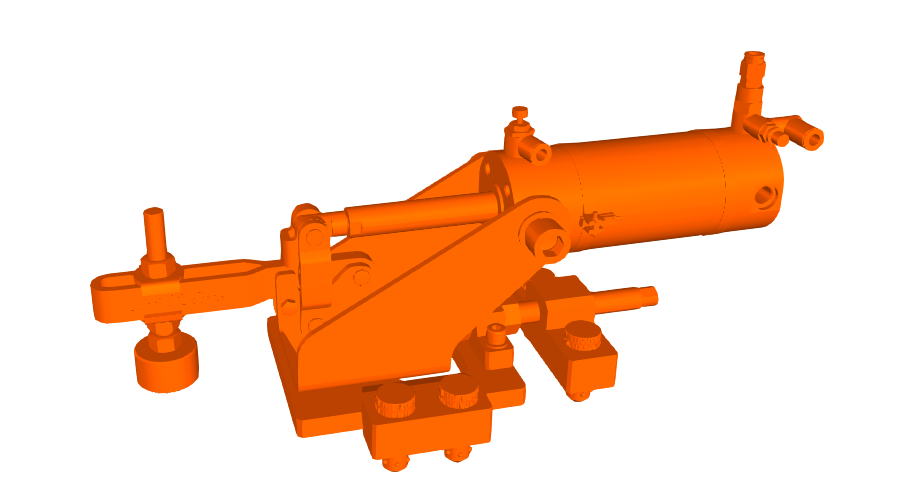
Sorry, that structure is too complex for the add-on. Also solving that manually is tricky and I can’t do that.
-k
Uploading: rotate.vcmx…
rotate.vcmx (42.3 KB)
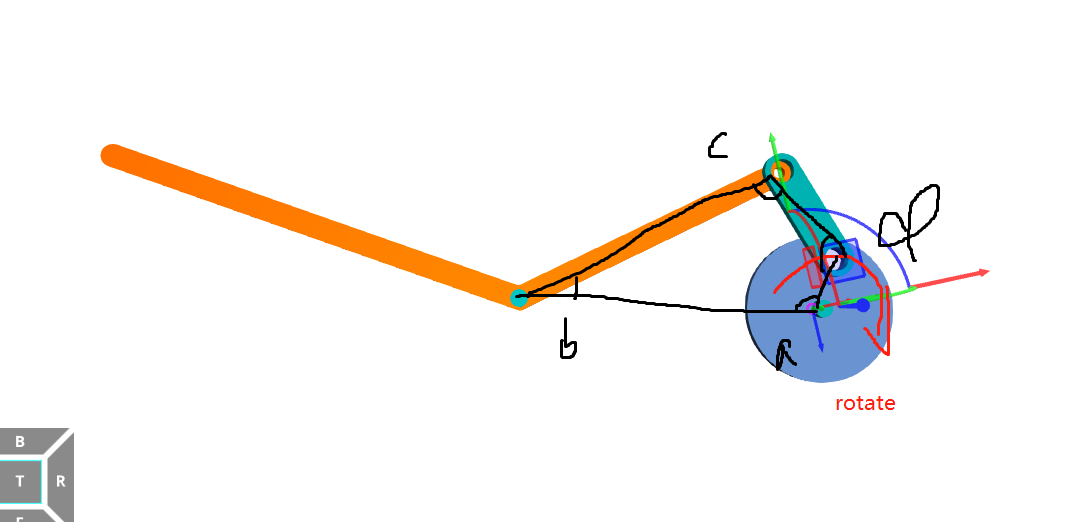
Why can’t this quadrilateral structure implement actions in this way,could you help me?thanks
Mechanism wizard doesn’t support this. Wizard only supports systems with 3 rotational joints and one translational joint. This system has 4 rotational joints.
-k
Hi @keke,
Mechanism Test.vcmx (4.9 MB)
Could this mechanism be solved using the add-on? I tried to do it, but my middle link cannot make it to move accordingly.

Any helps are appreciated.
Unfortunately add-on doesn’t solve this. Add-on only fits for kinematic chains with 3 rotational joints and 1 translational. This one has 4 rotational ones.
-k
Thank you for the quick reply
Hi,keke,This is too complex system for the mechanism wizard. I don’t know how to define this kind of device movement, can you help me, thank you!
机械连杆.vcmx (119.8 KB)
Sorry no I cannot help you. As you said your mechanism isn’t supported by this wizard. You just have to open those trigonometry text books and try to figure out the expressions to solve that system.
-k
Can you give me some ideas? I really can’t find a solution. Thank you very much.
In fact this is not a good topic to discuss since it is clearly a mathematical problem and it is certain that it can be done with the help of various formulas.
However, when an organization is not operating at high speed, you can refer to this post to use physics to perform such operations. ![]()
First of all, thank you very much for your quick reply. I have tried to do it once, but there still seem to be some problems. Could you help me do it?
Hi keke, it seems that this institution is not suitable for adding, I tried to solve it manually, but I can’t do it, can you help me?
滑块机构.vcmx (494.0 KB)
Hello keke
Please recommends my model gripper add add fix shock absorber but screw gripper can move follow robot you can recommends for build it .I try for fix shock absorber but i can’t . Could you help me do it?
Modeling shock absorber Gripper.vcmx (1.8 MB)
Mechanism Wizard will not help with that shock absorber component. For one thing that component is not self-contained but it needs to follow node on another component which is the robot.
There’s bit similar model in eCat from Cobot Lift (see the picture). It has an example of how you could approach this. You need python script to listen to events when robot moves and then you need to calculate the inverse kinematics for your device. That is you need to solve the math to turn x, y, z, rx, ry, rz position into joint angles. There is no universal guide to teach you how to solve these kinds of problems but it’s just pure mathematical problem solving.
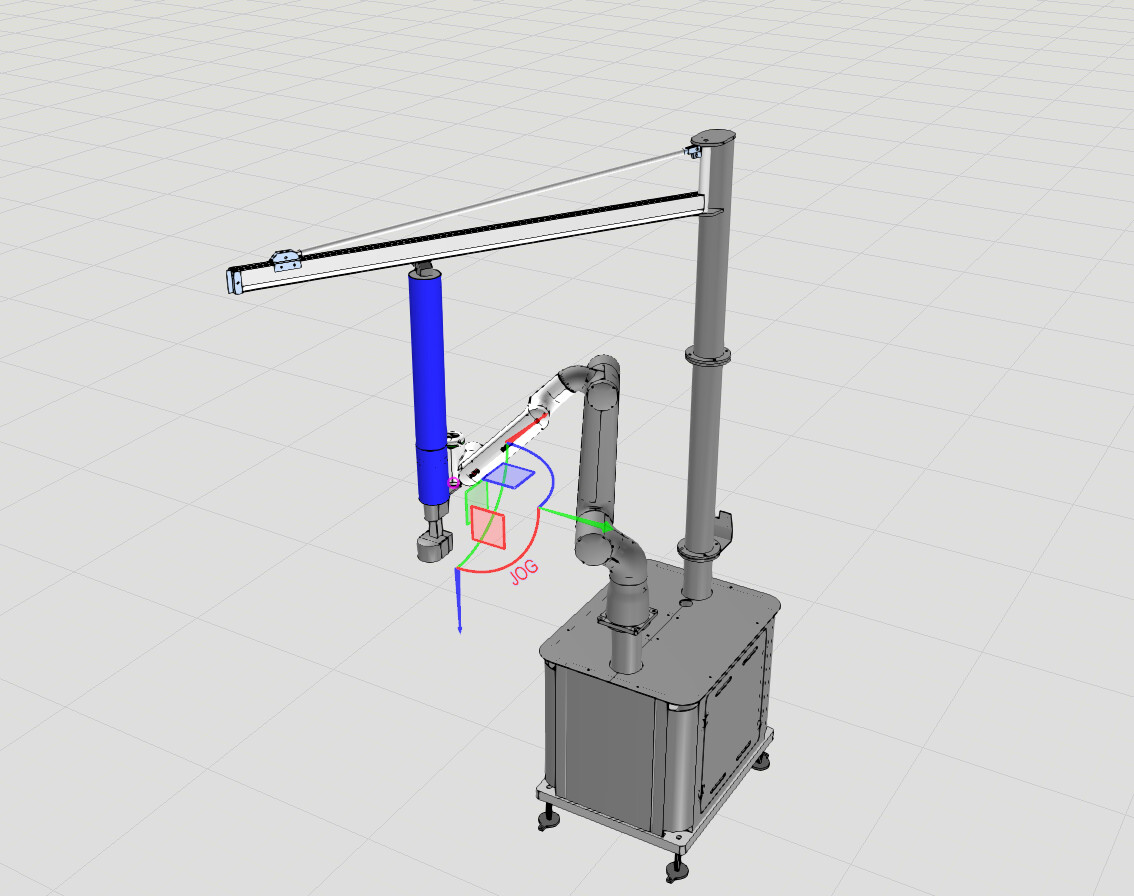
-k
1 Like
Thank you for idea solve . I will try .
Friends, please help me check J2, J4 and J5. I seem to have encountered a problem, but I’m not sure which one is correct.
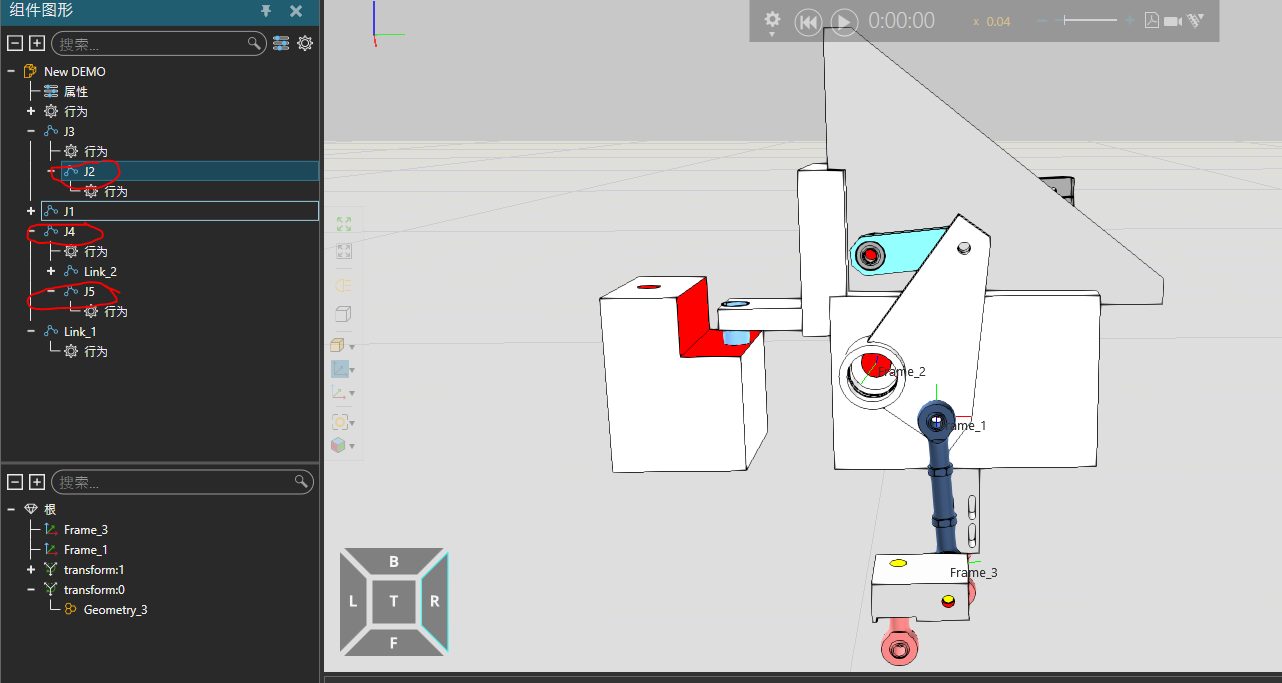
New DEMOv2.vcmx (190.0 KB)
Thanks
I used it well in the 4.8 version.
However, it does not apply from version 4.10.
Is there a solution?
Hello, it still works in 4.10. Note that from VC 4.9 onwards, command files should be placed to \Documents\Visual Components\4.10\My Commands\Python 2 folder instead of
\Documents\Visual Components\4.10\My Commands.
Also, make sure that the .zip is extracted.
1 Like
Thank you so much!!!
1 Like