Modeling closed loop kinematic chains can be a bit difficult. VC has helper functions called sasa-functions that help you solve mechanisms that form a triangle or a quadrilateral. Those functions require you to measure the triangle or quadrilateral effectively and for that I have created this add-on called SasaHelper.
To use the add-on unzip it under your Documents\Visual Components\4.X\My Commands -folder. Add-on will add two buttons on Modeling tab. Sasa Helper is used for solving triangles and Sasssa Helper is for quadrilaters. Launch the add, select a plane where your triangle/quadrilateral needs to be solved in and then select 3/4 corner points on the 3D model. Add-on prints side lengths and corner angles and pre-filled sasa-functions that you can copy-paste as your follower joint expression and make some modifications on them to create a functional follower.
I will post a link to a tutorial video on how this add-on is used. Add-on package contains two test models on which you can try it out.
Hi @keke! Im trying to solve this system with your add-on. Which works great but I don’t know am I using it right
I’m using J1 as driver to drive the J2 both are custom rotational joints. I didn’t fiqure out how to drive custom rotational joint with translational joint.
Should I use Sasssa helper instead of Sasa helper?
Sasa helper can be used for this but I think even Mechanism Wizard would work on this (see 2nd post). Just make sure to model followers as “Rotational follower” and “Translational Follower” instead of “Custom” joint if you use that wizard. There are some example models for the wizard so check those out to see how it works.
Custom joints have that pivot property which I need because other joint types rotate around the whole systems origin point It doesn’t help if I set parts origin into pivoting point it still rotates around the Main components origin.
It’s true that other link types don’t have pivot but still you should prefer using them. Here’s a small trick that allows you to set the link origin for rotational type without moving the geometries in world coordinates. Use “Move Mode” of “Selected” to change link origin. Just remember to set “Move Mode” back to “Hierarchy” after that. “Selected” mode cancels child object’s translation by applying inverse offset to them when parent object is moved and this can easily mess up your model’s feature and link positions.
Just to be clear rotational type rotates around link origin. And link origin can be moved like any other 3d object. And in previous video I used snap command to move link origin at the center of that cylinder. With “Hierarchy” move mode that would’ve also moved child features but that’s not what was wanted so “Selected” move mode was used instead.
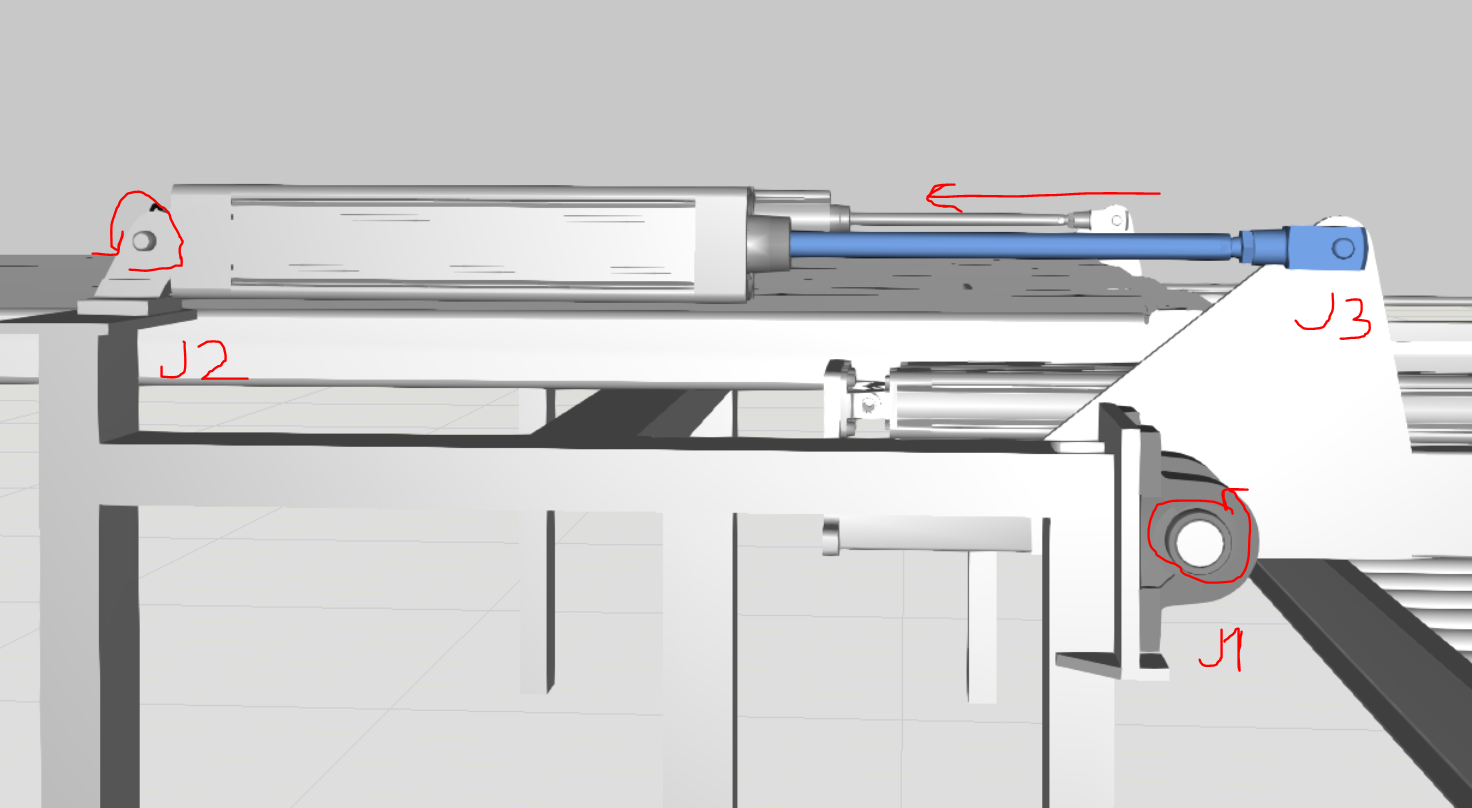
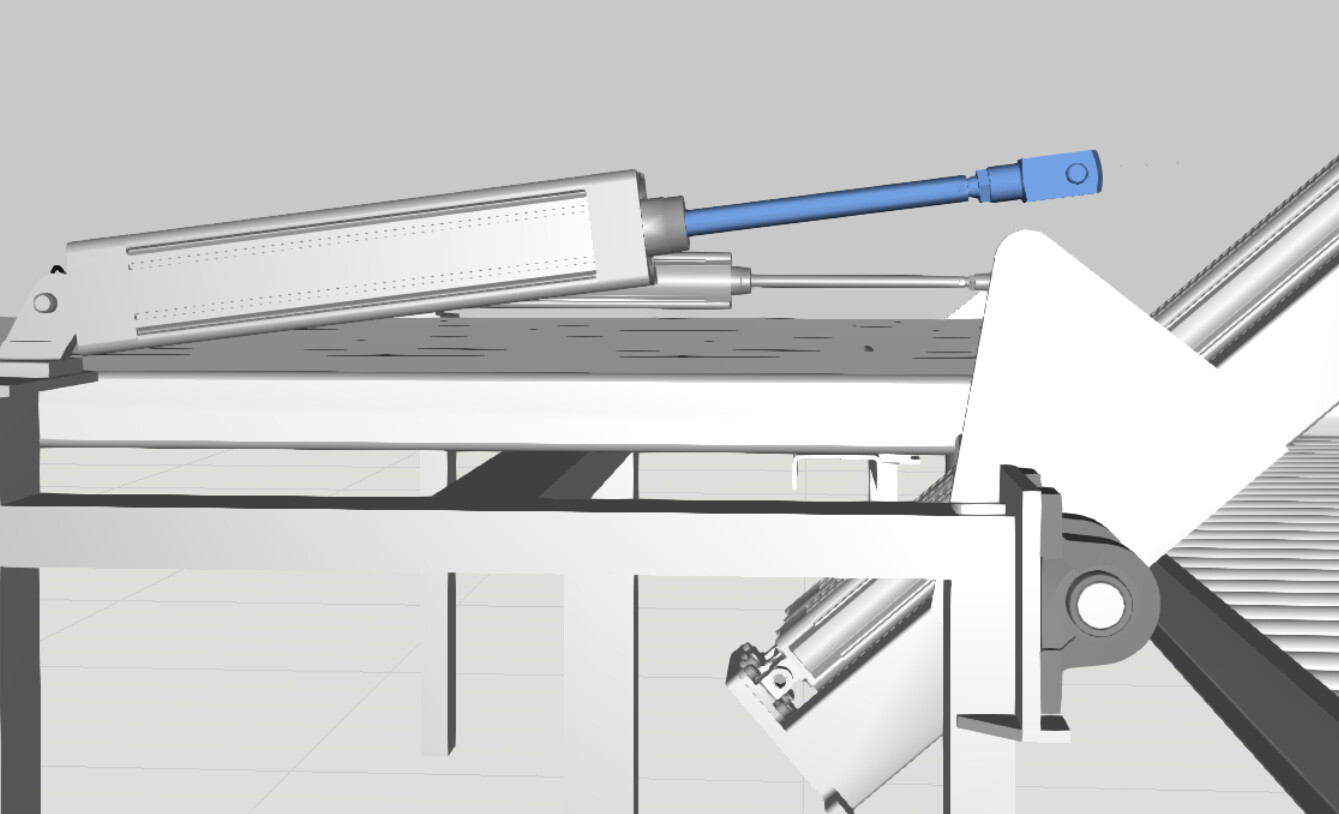
Hello @keke , I need your helps to solve my mech movement. There are two fix joints rotations as picture. I also sent file. If you have time, please help me T-T
First of all you should import your CAD model into one component and one link. Now the geometries are under different links and it’s not a good starting point to create the moving joints. After doing this this is a system where you can use Mechanism Wizard add-on also referred on this thread.
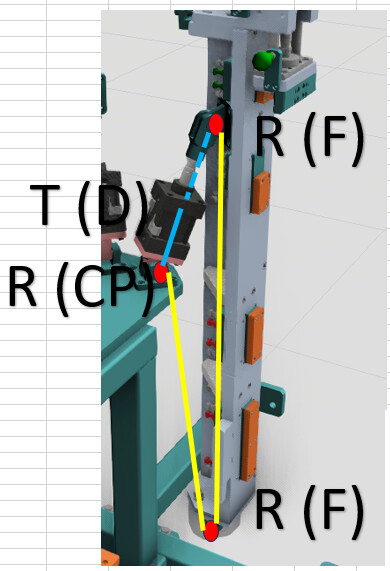
In the following video you see how I first organize the geo into one component. I don’t have the original CAD so I use a trick to export layout geometry as STEP and then import it back. After that I separate the geometries into links and snap link origins at the joint pivot points. Then I create the driver joint and two followers in order to be able to use Mechanism Wizard. Finally I use the wizard to solve the follower joint expressions.
Here’s the component made on the video: xtd.vcmx (1.4 MB)