Hi,
This is too complex system for the mech wizard. On this system I recognize 3 closed kinematic loops. These are shown in the picture below.
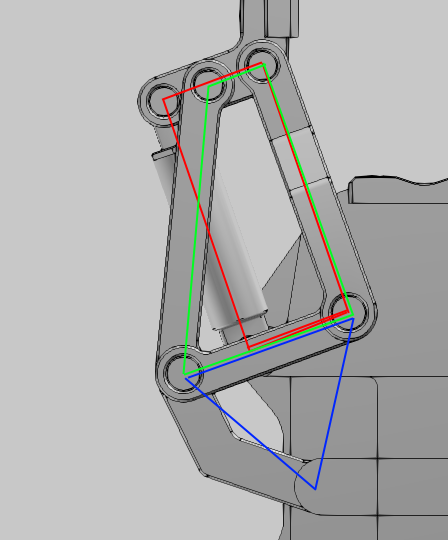
All those loops are connected so this makes modeling them quite difficult. But I would start by modeling the red loop first. I select driver on that loop and two followers on the loop are quite easy to solve. Then I move to green loop. This one is more difficult to solve because its sides are no longer symmetric like on red loop. But I can use sasa-functions to solve followers on it. There’s this add-on Sasa-helper (SasaHelper for modeling follower joints) that can be used to measure the system and get pre-filled sasa-functions printed automatically. The following video capture shows how I modeled red and green loops.
For last blue loop you kind of need to dive into the deep end and solve it with trigonometry. In the picture below you see one way to solve blue loop.
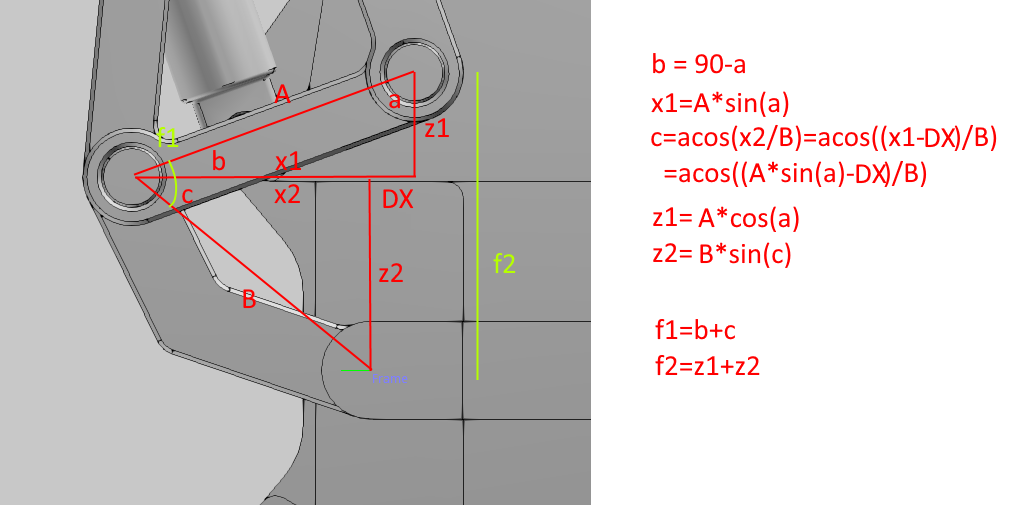
Lengths A, B and DX can be measured. Angle a is the driver in this case. The rest of the angles and lengths can be solved with trigonometry. Really the difficulty here comes from placing previous results into the expressions. This is 3rd consequential loop so the expression for driver a is already pretty lengthy and the end results f1 and f2 get really long.
The final result is in the attachement. I only solved one side so see if you can replicate it on the other.
夹爪模型.vcmx (438.6 KB)
-k