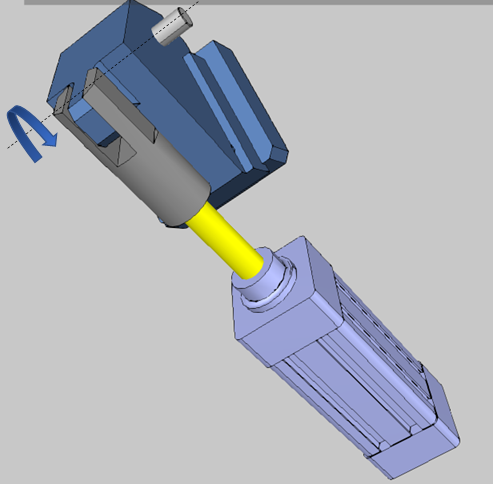
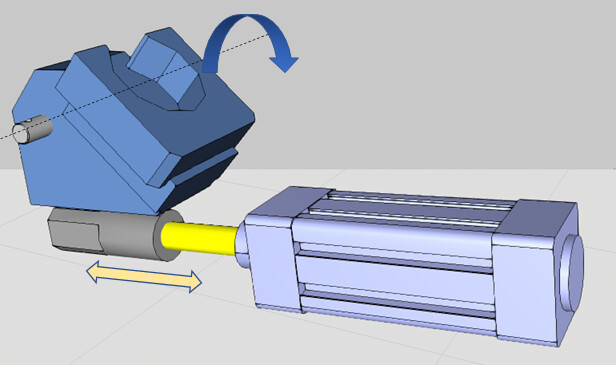
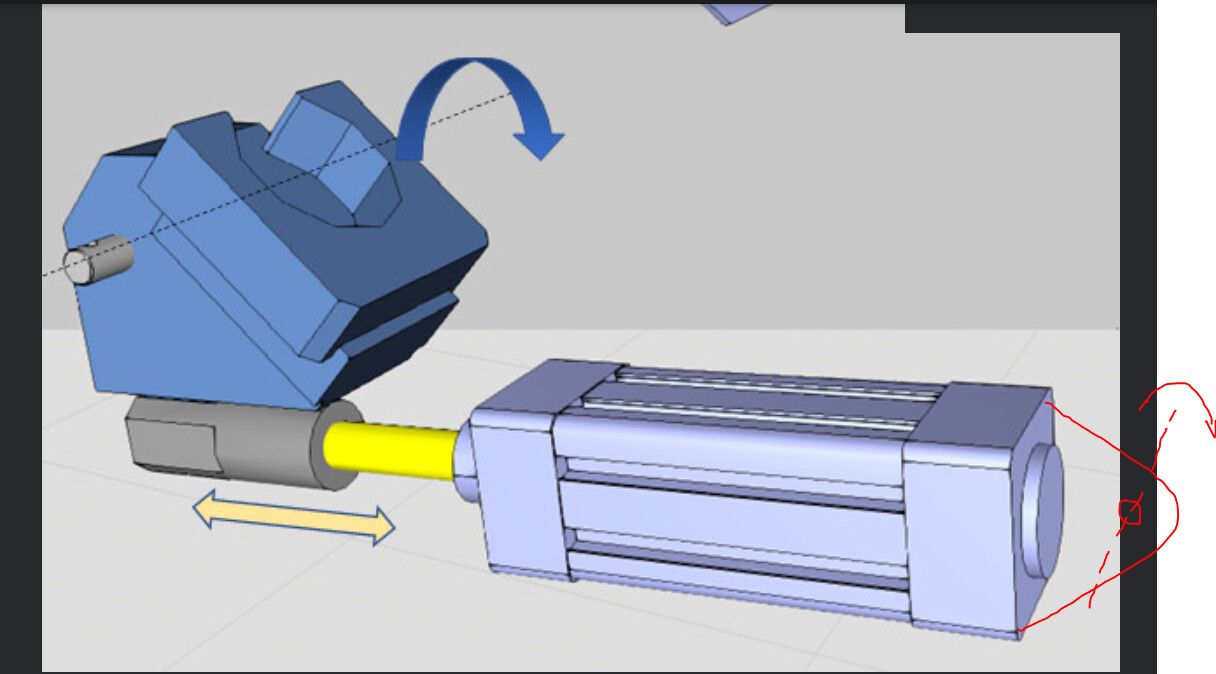
I am trying to modelize a cylinder piston that is articulated to an element which, at the same time, can rotate around an axis (see pictures below). Therefore, when the piston retracts, the other piece should be forced to rotate around the aforementioned axis.
I modelled the cylinder piston as a translational joint and the other piece as a rotational joint but I can’t manage to make the rotation as an effect of the piston’s translation.
I’d appreciate any comments and if you need further information, please ask.
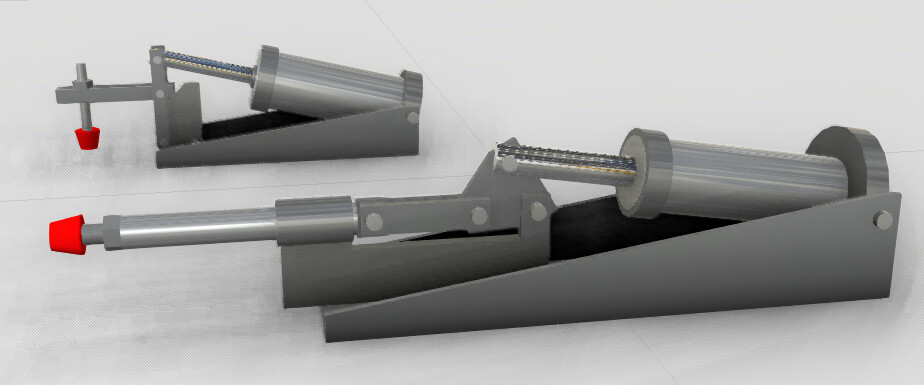
Have you checked the Clamping components in eCatalog Misc category? I think these give a pretty good example of how to model just mechanism with follower joints.
I checked the clamping component and the way the movement is modelled looks rather complicated for simulating just some articulated system, since for what I have seen, it calculates the position of the links in the component mathematically. Moreover, in the clamping component, the pivot point of the linkage translates a bit instead of just rotating around itself so I am afraid that it’s gonna be quite difficult to model it in a precise way.
I think I considered all DOF necessary. If you were refering to the rotation of the casing of the piston, I already took it into account. The only thing I’m missing, I guess, is to calculate the maths behind the movement. Before that, I’m gonna try out what you uploaded.
I tried with the Add-on (TheMechanism) you suggested and it works perfectly fine so thank you very much!
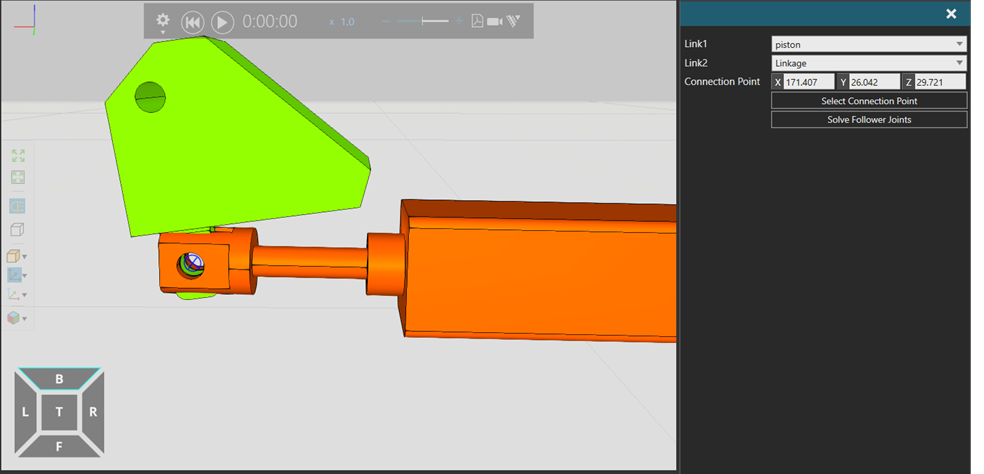
I upload the model for anyone who has the same doubt as me and also an image of the parameters I used when using the Add-on. piston.vcmx (74.8 KB)