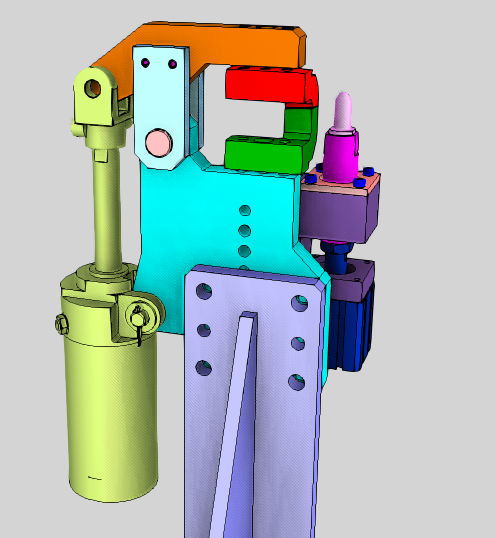
Hello, everybody. I have an organization like this, and I don’t know how to achieve joint movement. RightUploading: 12.png… Untitled.vcmx (418.1 KB)
Hi,
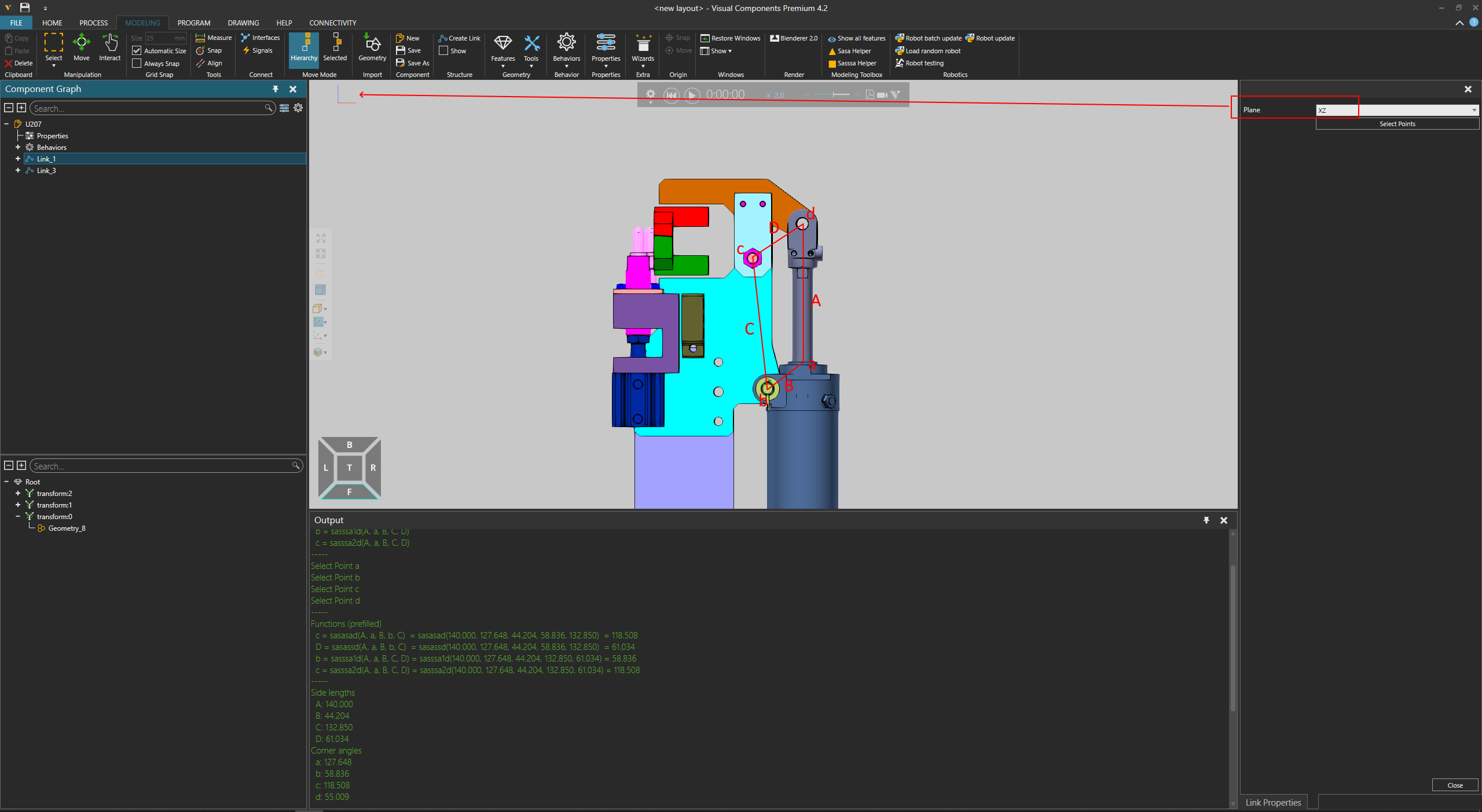
In Help file under topics “Functions” there are helper functions (“sasa-functions”) for solving triangles and quadrilaters. They do require some measurements but the math itself can be solved with these functions. I created the follower to your mechanism using those so check out attached model.
U207_1.vcmx (415.7 KB)
-k
Beautiful
Regards
Feature
It’s amazing,thank you very much

- Can you record a tutorial? Thank you
Check out the add-on in the following link. It’s a add-on that I use to model these kind of things. There’s a tutorial video that explains the add-on and sasa-functions.
-k
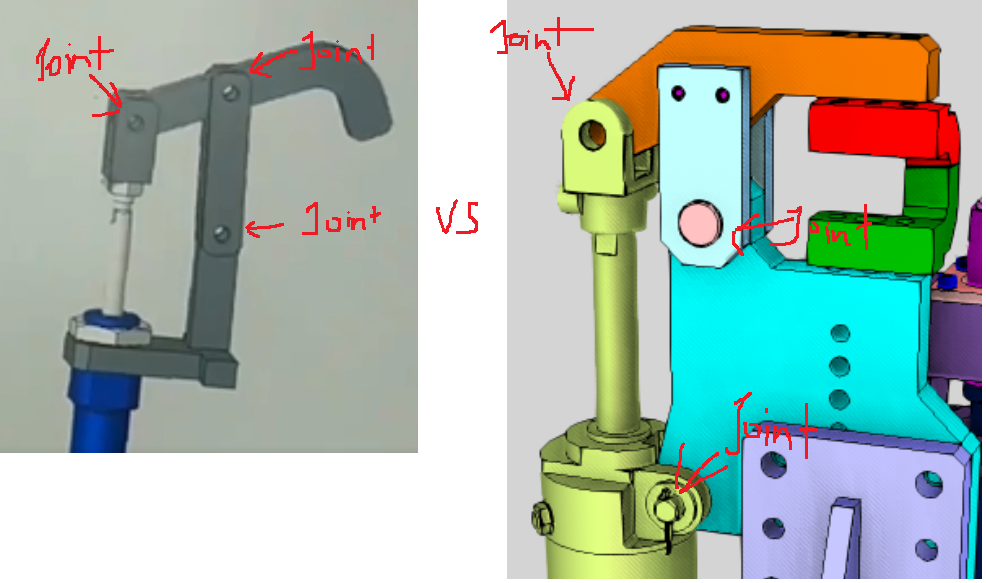
I chose sasaHelper, but the motion is wrong, and the mechanism defined according to the picture is not correct
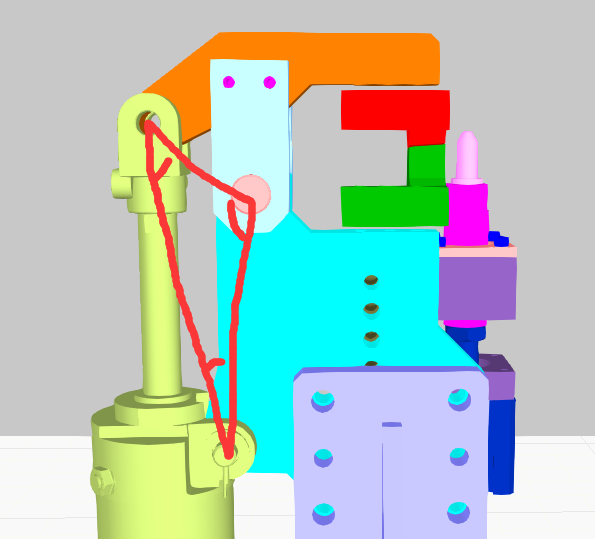
- Can you help me to mark the Angle of ABCD and the line segment,thank you very much
- Could you help me with this problem? Thank you very much When using the feed and NEED commands in the Workprocess, the placement posture is always incorrect, and modifications are always not applicable in the robot program. Can you modify the grab and placement posture
Hi,I have an organization like this. I don’t know how to define this kind of device movement, can you help me, thank you
机械连杆.vcmx (119.8 KB)