When using the feed and NEED commands in the Workprocess, the placement posture is always incorrect, and modifications are always not applicable in the robot program. Can you modify the grab and placement posture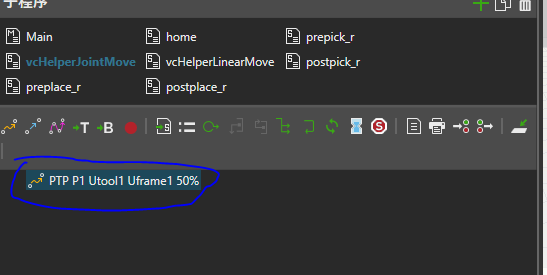
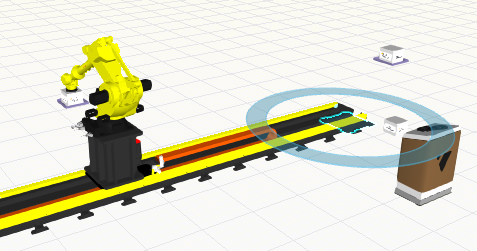
When using the feed and NEED commands in the Workprocess, the placement posture is always incorrect, and modifications are always not applicable in the robot program. Can you modify the grab and placement posture