Hello,
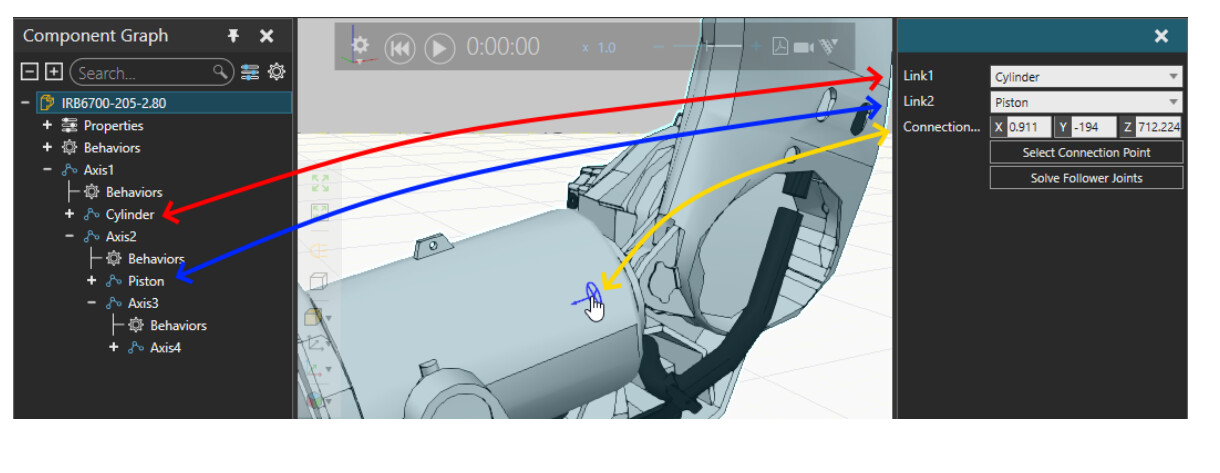
When I model balancing cylinders, I start by configuring the link nodes for the cylinder and piston: one must be under J1 and one must be under J2 in hierarchy, and the rotational axes must be in correct positions.
Then comes the tricky part: value expressions for rotational follower joints. The idea is that origins of J2, the piston and the cylinder will form a triangle.
Luckily, there is an addon that is helpful in solving the value expressions for angles of a triangle: Mechanism Wizard - Extensions and Python Add-ons / Visual Components Add-on Samples - Visual Components - The Simulation Community . The addon files include a PDF tutorial where one example shows usage with a similar balancing cylinder: