Hey guys,
I am new to vc and have a project to do.
I want to connect a virtual and a real robot in a way that both of them will copy the pose/ movement of each other.
In the case you will move the real robot, the virtual will do the same and vice versa.
I will appreciate any help or suggestion.
p.s. I am also trying to find someone to undertake this project for me but no luck till now. If you have any lead about that, would be great!
If you don’t have Premium then you could try to use python scripts and python socket to communicate with the controller. There are few posts on this forum about sockets. For example on this one I posted few example models where two robots are communicating with UDP and TCP/IP sockets within the layout: How to read values from external python script
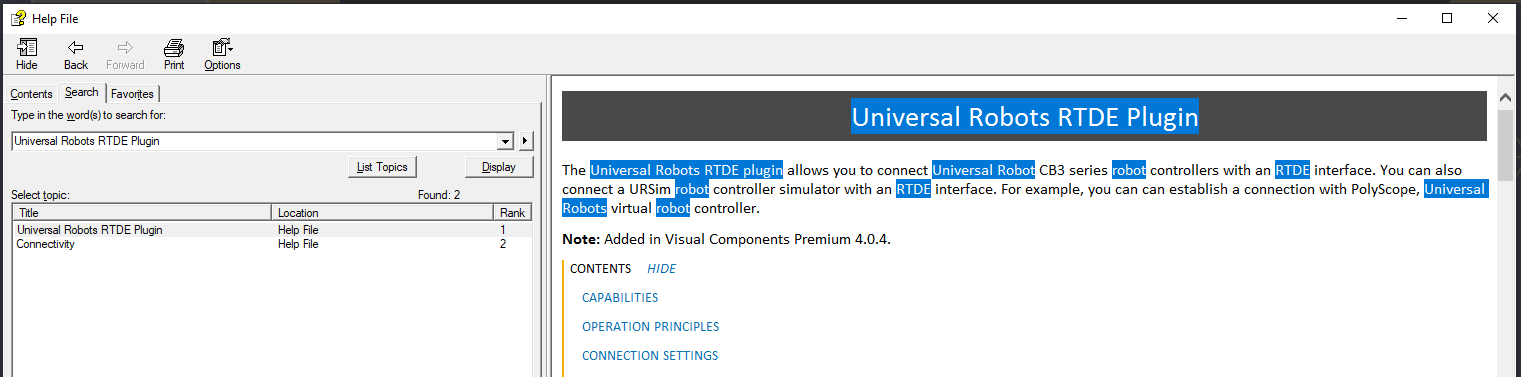
Note that the RTDE interface is only for exchanging robot IO and status information such as joint values. It doesn’t allow you to directly command the robot to move to certain pose for example.
The Universal Robots RTDE connectivity in VC Robotics and Premium is easy to use with configuration through UI and has good performance but it is of course limited to the functionality of that RTDE interface on the UR controller.
@TSy,
you are right.
RTDE is the one part of what I want.
The other one -to control the robot through vc- will probably have to be programmed. Something I have no idea how to do…