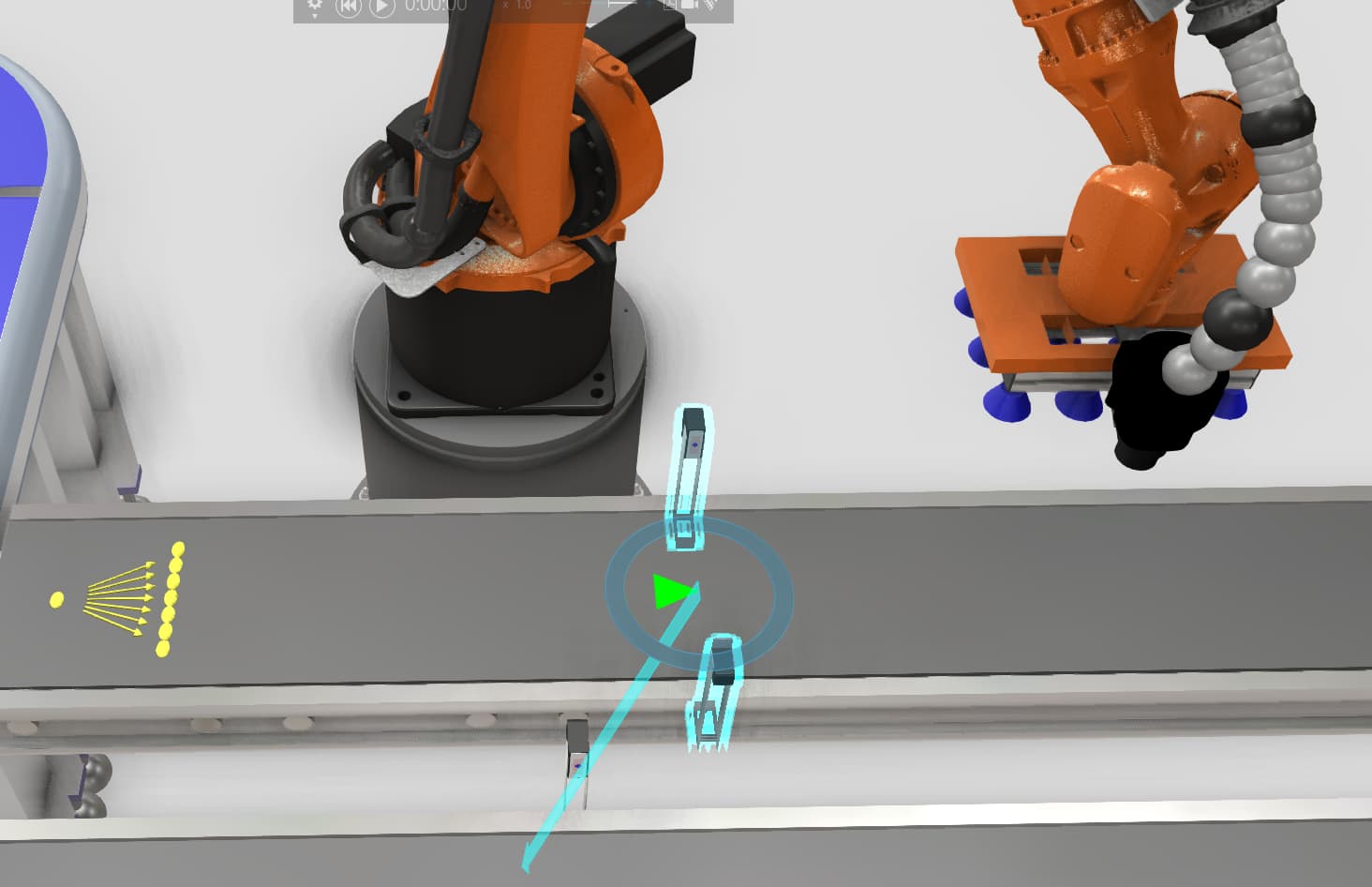
However, when I am running the simulation, I see a issue with the sensors on the conveyors. They are “TRUE” for a longer time, than expected, which causes the robot to pick up the part too early.
The first time, the SensorBooleanSignal is rather OK.
I would like to get the movement a bit more syncronized, so that I always pick up the batch of 3x2 at the same time and in case the cycle time is too short, then the parts should be moved further down the line.
It is like a too much reaction time of the sensor. Should I use the Sensor Conveyor component istead?
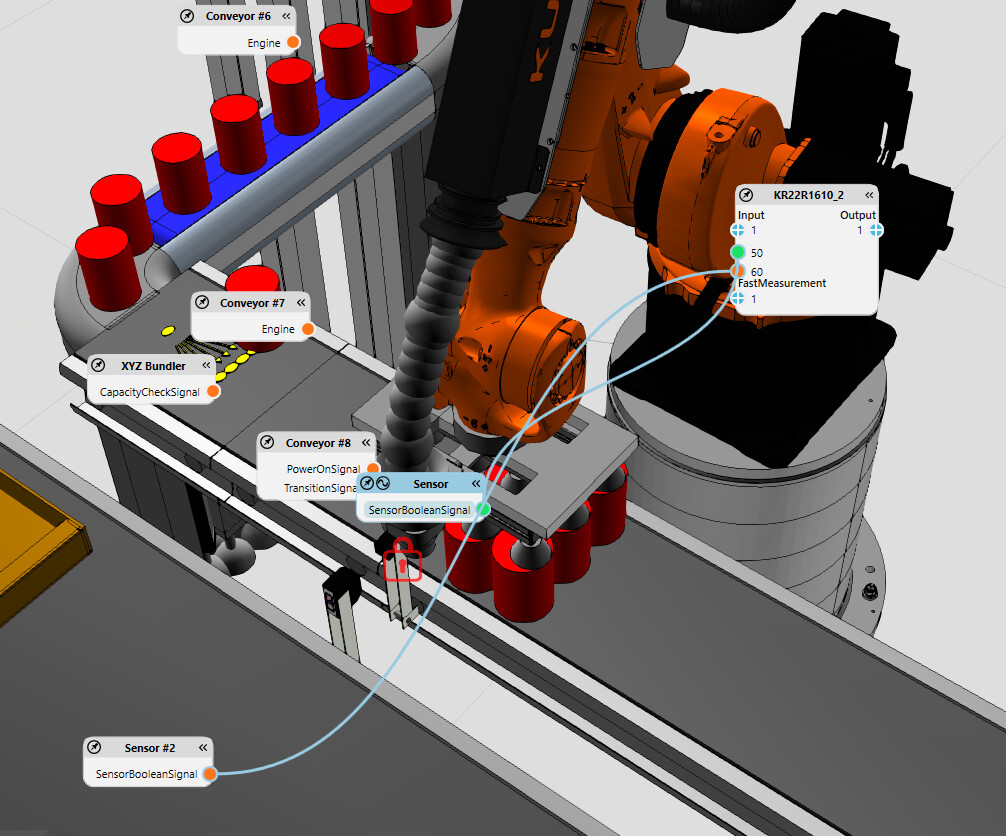
Any ideas why my Sensor signals are a bit delayed or perhaps any ideas to streamline this better? You can see here, that the sensorSignal for sensor 1 is still TRUE, even that there are no parts there anymore.
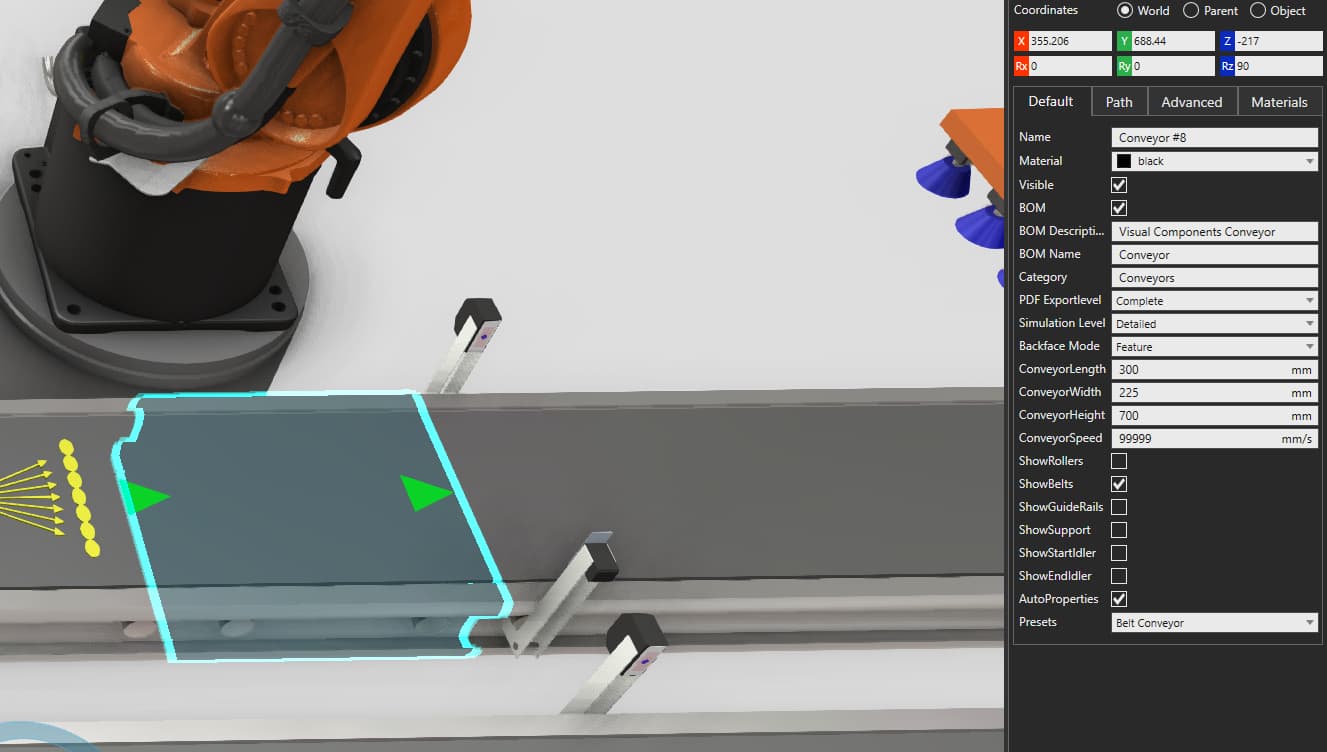
For me the robot does not move at all, but I think your problem is related to the fact that you have the speed of this middle conveyor set to ‘infinity’;
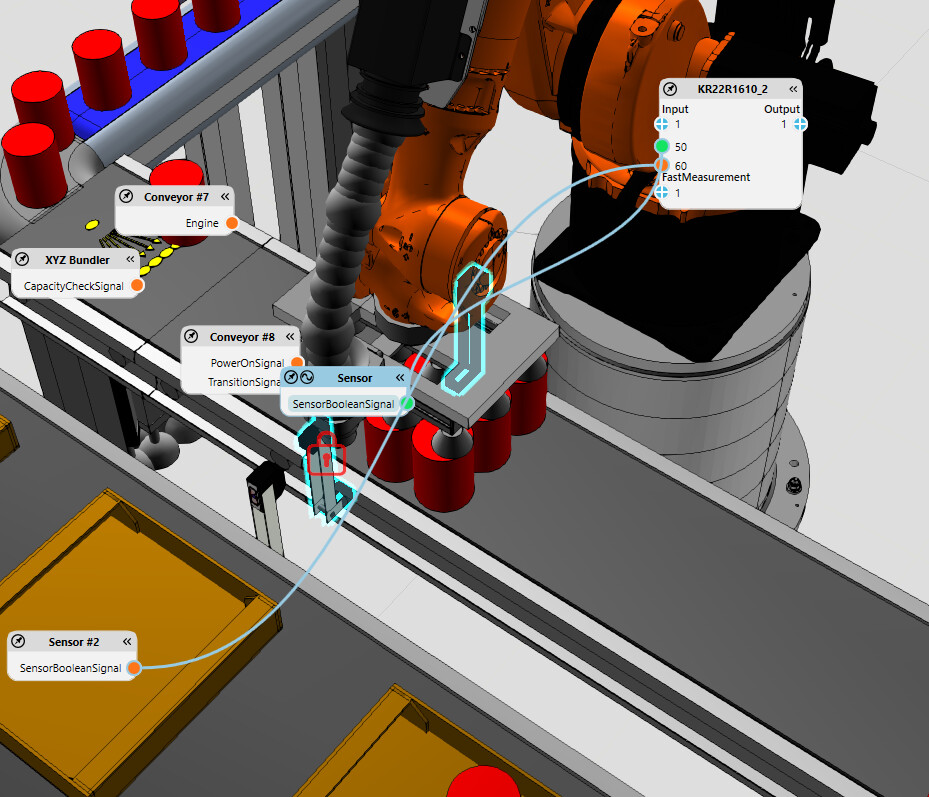
Seeing the sensor is placed at the intersection between these conveyors, this might cause the strange behaviour. You could try to place it a bit futher away on the final conveyor;
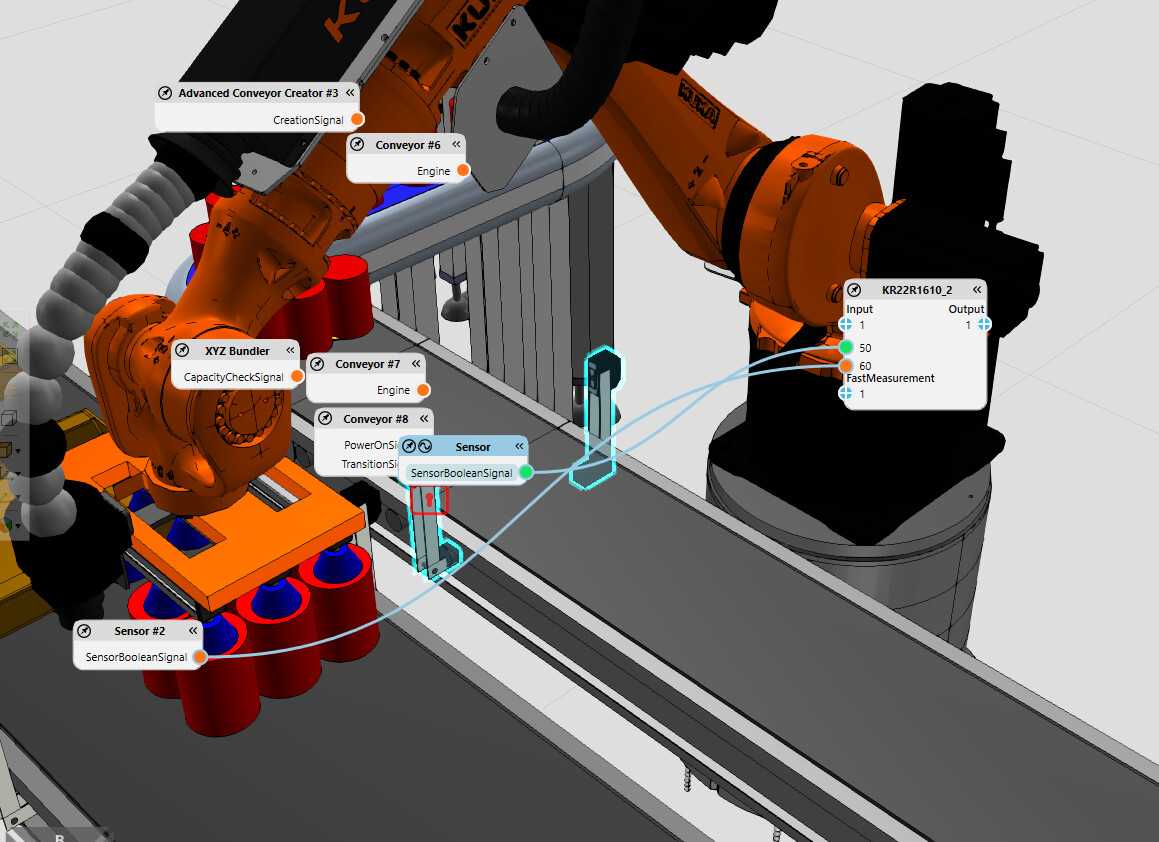
I have tried using the Conveyor Tracking component and still I dont get why the signal from the conveyor tracking is TRUE for a longer time, where there are no parts. ConveyorTracking with signals.vcmx (2.9 MB)
I think I know why the sensor signal is confused. It can not really handle 2x3 parts stacked together. I.e. when I draw them in a CAD program and imported the 2x3 as a solid component, it worked much better…
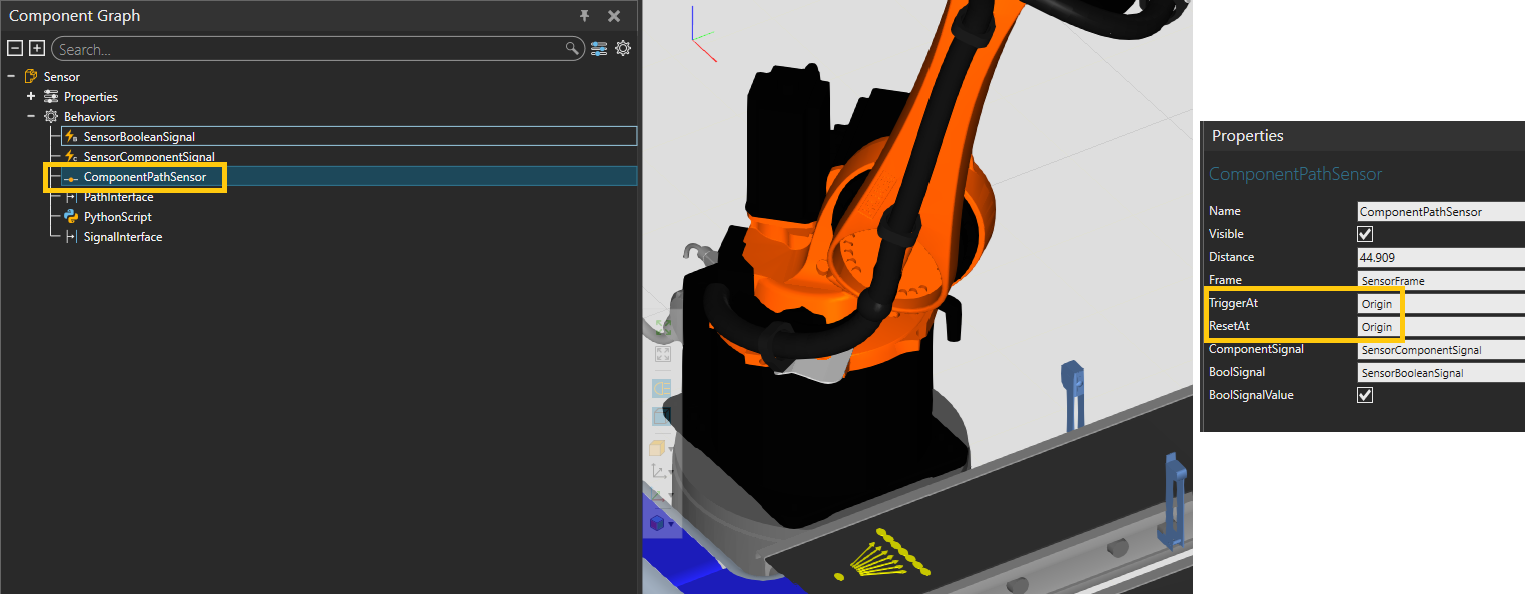
Maybe it’s a bit late to post this, but from the ConveyorSensor component → ComponentPathSensor behaviour → change the TriggerAt and ResetAt values and check.
Same story, maybe a bit late but for the conveyor tracking version.
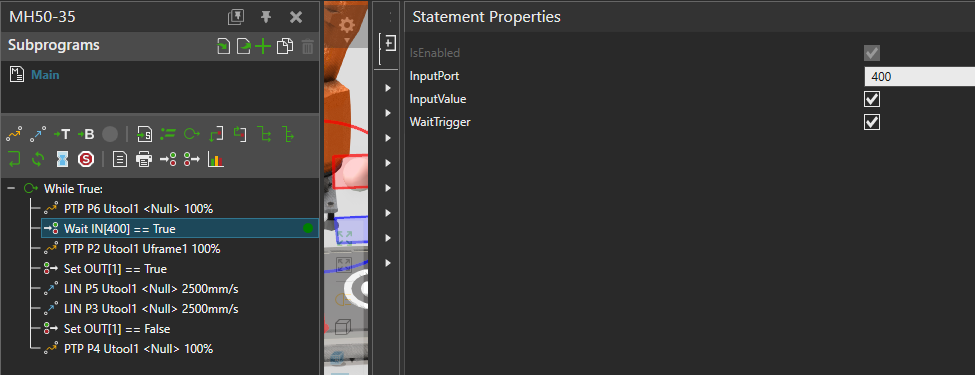
Check the ‘WaitTrigger’ box on your wait signal statement and your simulation will work: