Hi there
Which python API command returns the position coordinates of the robot arm?
Hi there
Which python API command returns the position coordinates of the robot arm?
The end of the arm, each individual link or the current position of the tool center point? You want world or local coordinates?
Hello,
is there an API that returns the end of the arm or the current position of the tool center points in any coordinates (world and local)?
Hi @fs3719
Yes. You can get the defined TCPs (Tools) from the robot controller behavior under Tools property.
This example gives the position of the first defined TCP (index 0) in the flange node coordinates and world coordinates:
comp = getComponent() rc = comp.findBehavioursByType(VC_ROBOTCONTROLLER)[0] tool = rc.Tools[0] tool_node_mtx = tool.PositionMatrix tool_world_mtx = tool.Node.WorldPositionMatrix * tool_node_mtx print "Node position", tool_node_mtx.P.X, tool_node_mtx.P.Y, tool_node_mtx.P.Z print "World position", tool_world_mtx.P.X, tool_world_mtx.P.Y, tool_world_mtx.P.Z
In order to get the orientation, use e.g. the WPR property of the matrix: tool_world_mtx.WPR.X or get all rotations with tool_world_mtx.getWPR()
Note: if you’re doing this while the TCP is moving, call tool.Node.update() before getting the WorldPositionMatrix (it will refresh the location info).
Hy,
Is this true for getWPR()?
And do getWPR() return Intrinsic or Extrinsic Rotations and in which Rotation Order?
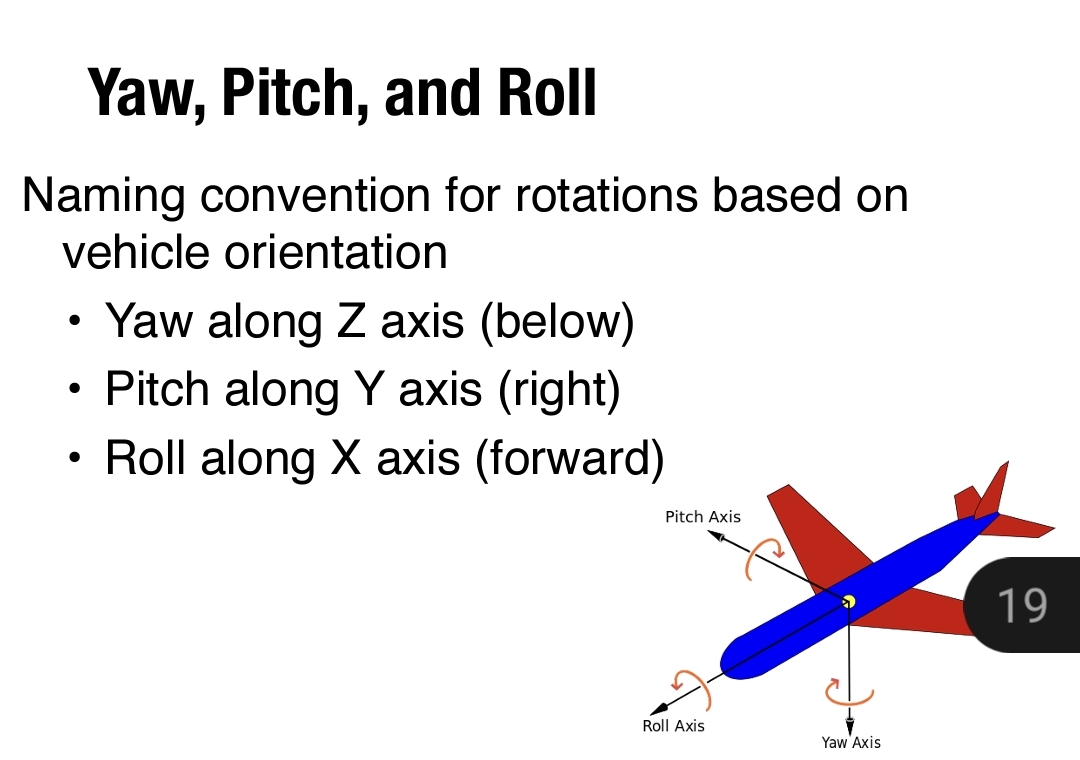
What does the “W” stands for in WPR? W=“?”, P=“Pitch”, R=“Roll”
Refer to: Geht transformation-rotation in Tait–Bryan angles
Thx & Regards
Feature
WPR is the same what e.g. Fanuc and Yaskawa uses. It’s the absolute rotations around the axes (order can vary, in VC it’s XYZ) in the reference coordinates i.e. using static axes (the base frame). Euler is defined as relative, consecutive rotations (i.e. the coordinate axes change after each rotation) and the order also varies, in VC it’s ZYZ.