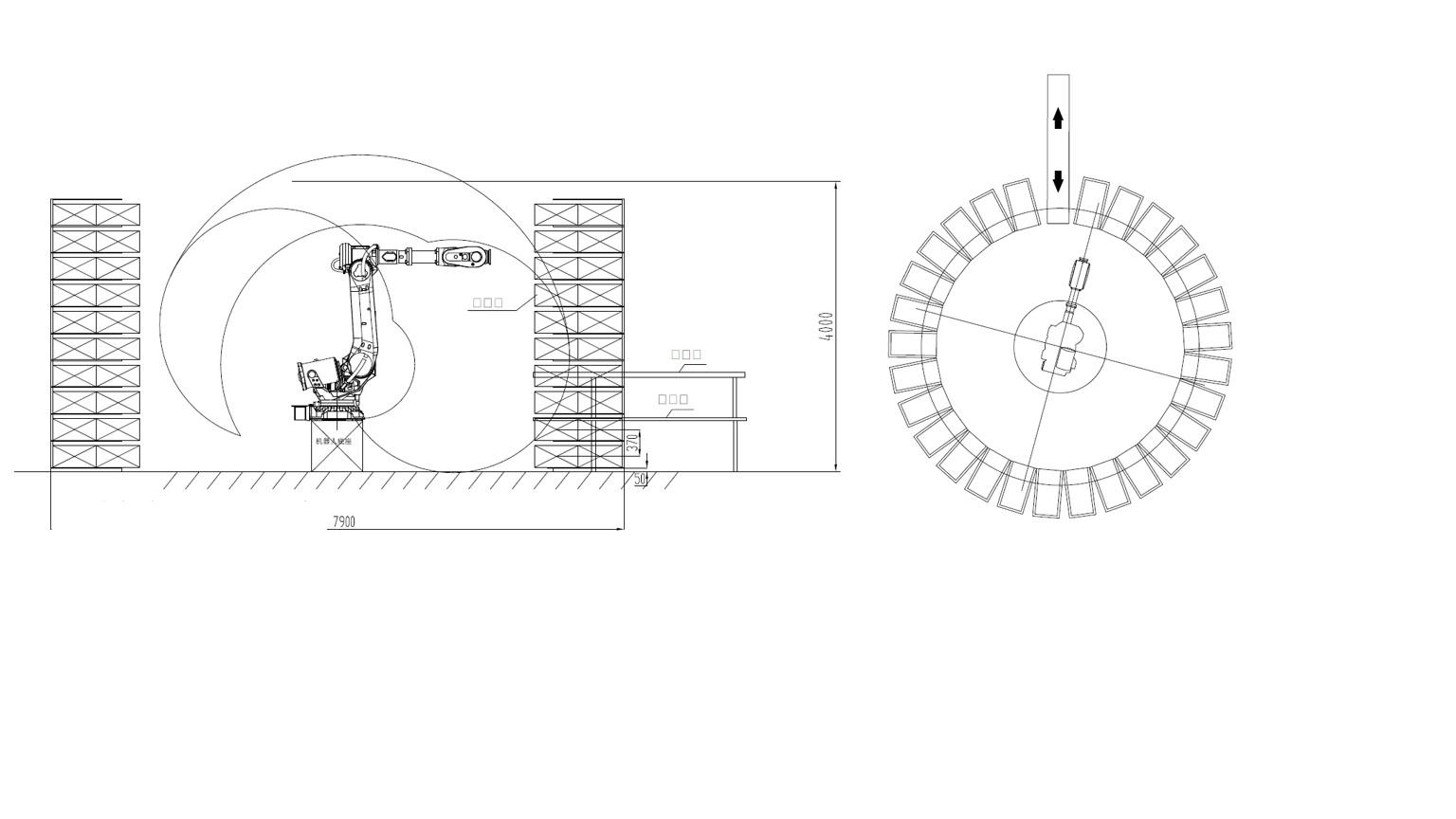
I have a simulation case that the robot need to pick and place crates into and out of shelf. The shelf is circular arrangement with robot in the middle.
I thought this case is similar with AS/RS while the working instrument is Robot not crane. But the configuration is different.
Could you recommend which components in eCat. is helpful for this layout and How to do the robot programming accordingly.
If you did the similar layout before, the sharing would be very helpful.
Why dont you use WorksProcess then? I think another option is to change script of the component to need 2 parts and merge them before they send out, but easier is better.
If you r not gonna create 100 of this cell block in layout. I think using WorksProcess is the best option.
Just create 1 column of WorksProcesses, create your tasks, group them and clone over and over to get your circular shape.