For several days I have been trying to simulate a second gripper that is not connected to a robot in the simulation, but luckily so far with no success.
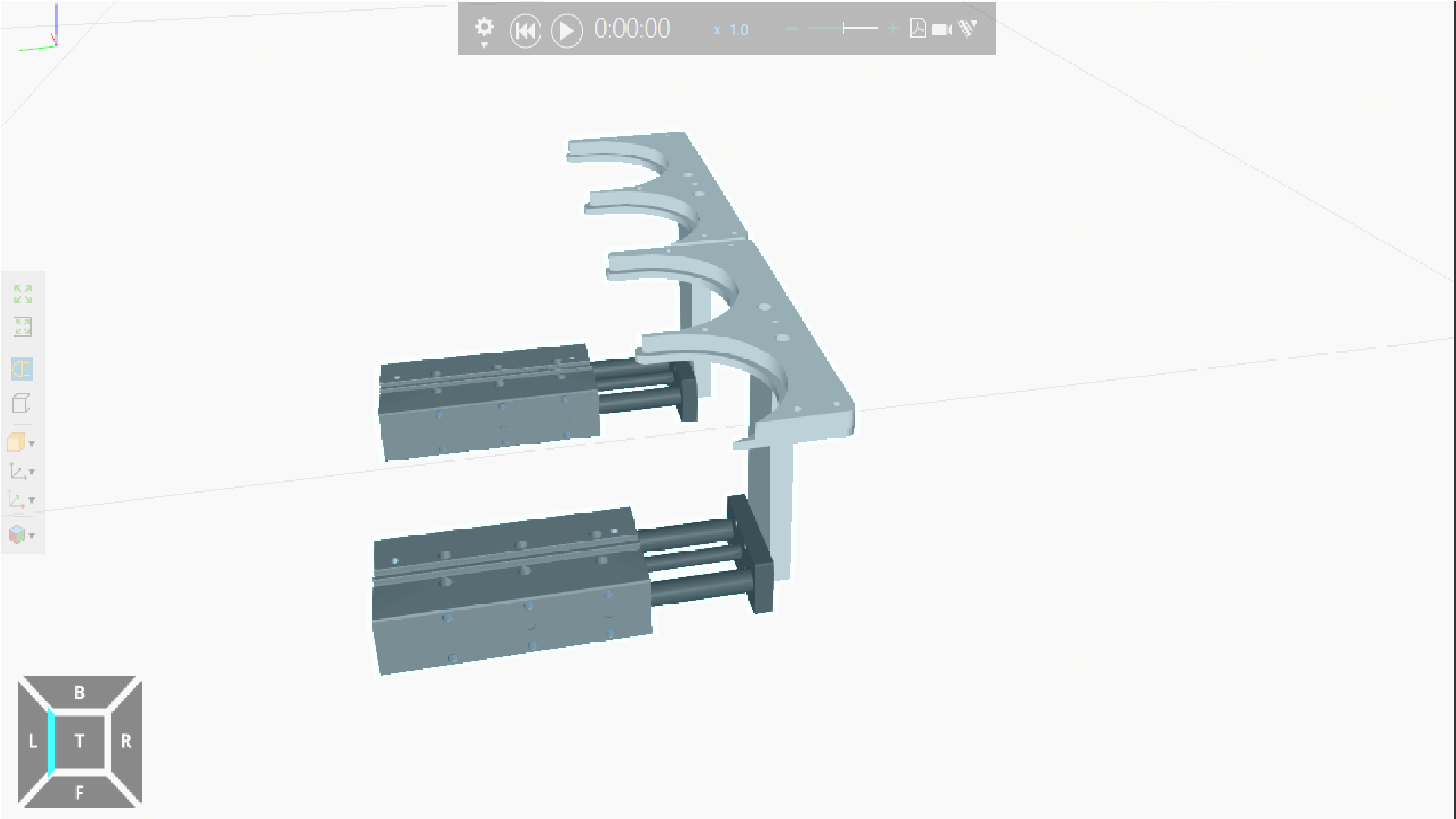
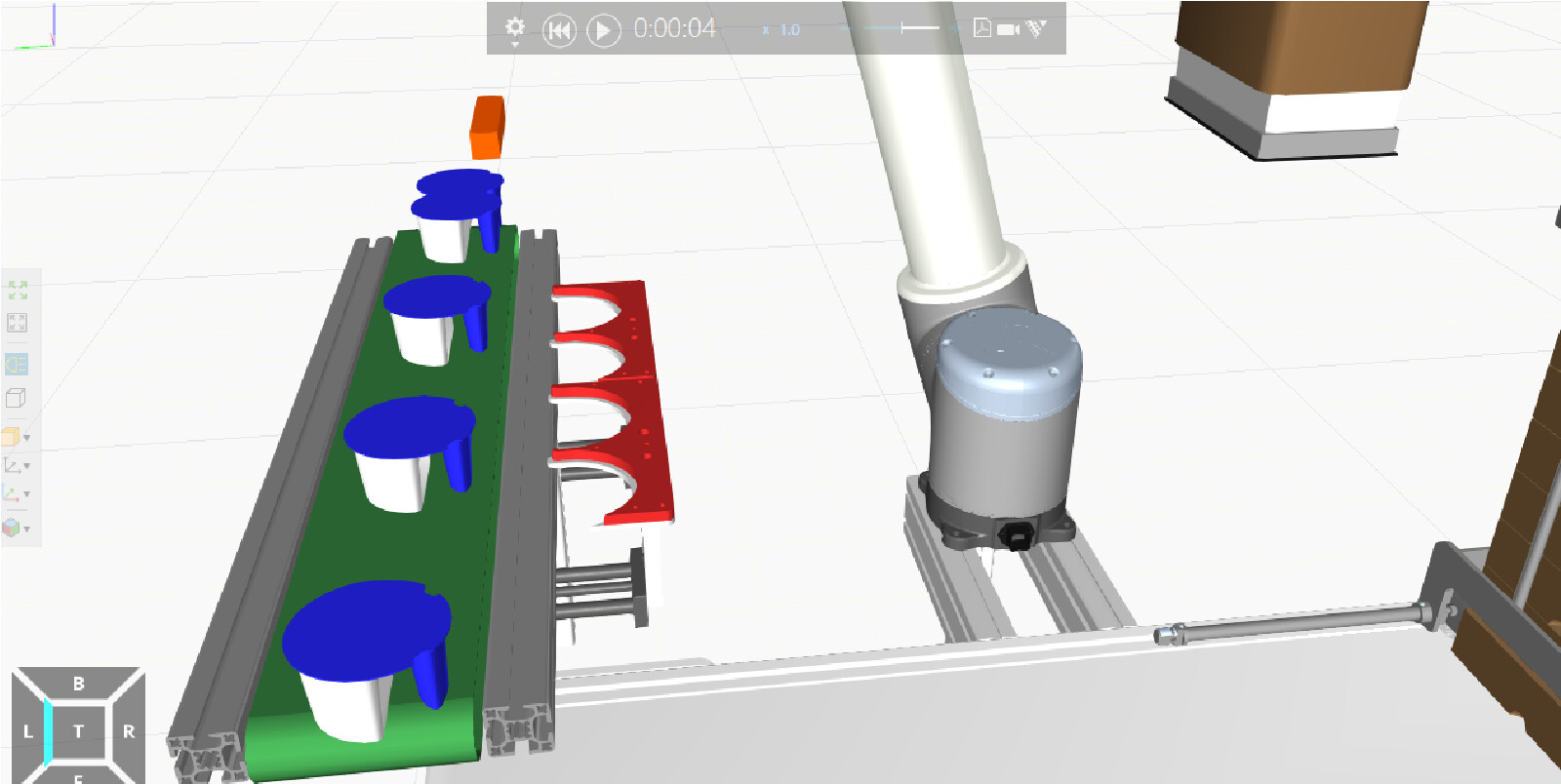
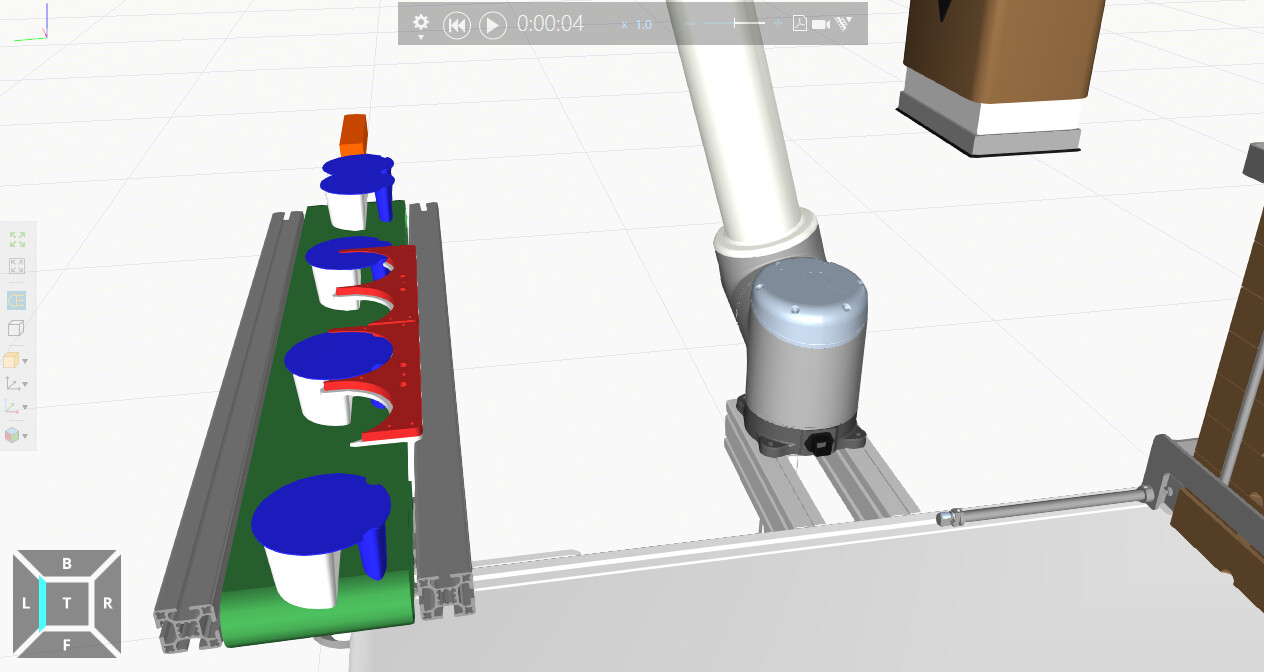
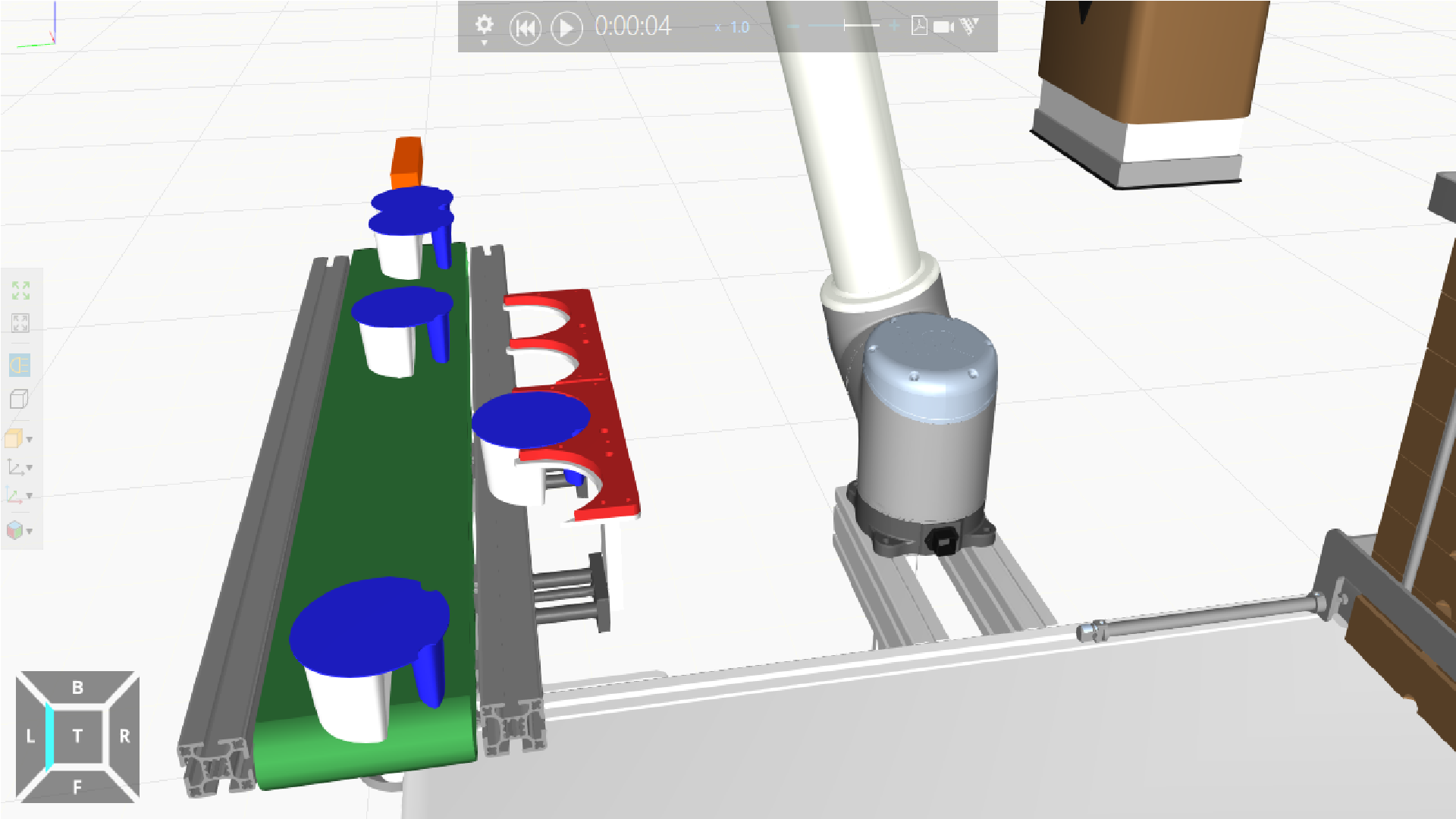
Basically what I want to do is a second gripper, which is fixed motionless on the conveyor and is able to move to grab and release objects.
Could you suggest how to approach this problem?
How it should move separately from the robat, Capturing the omens, and the robot must understand who needs to pick it up from the capture.
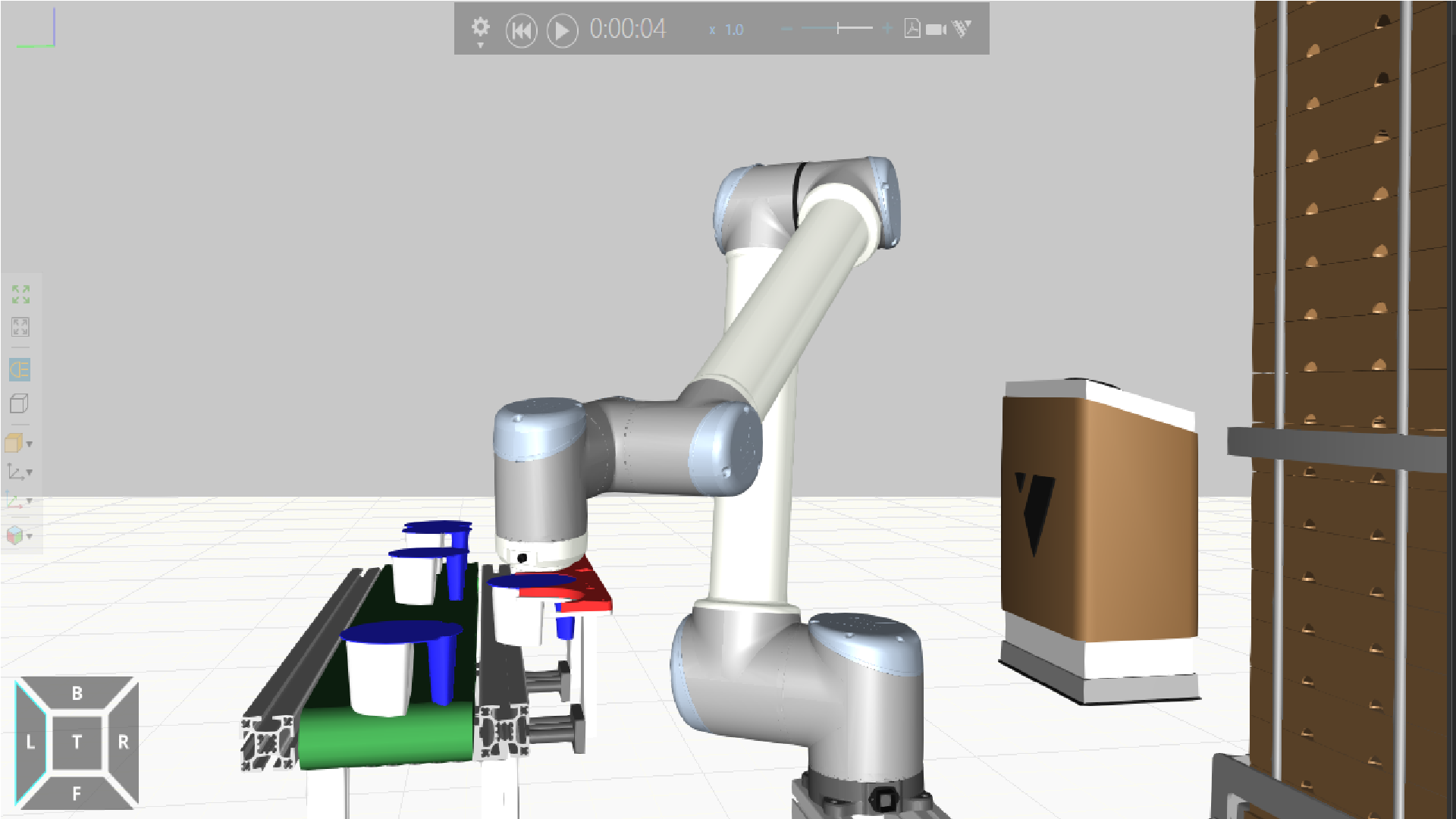
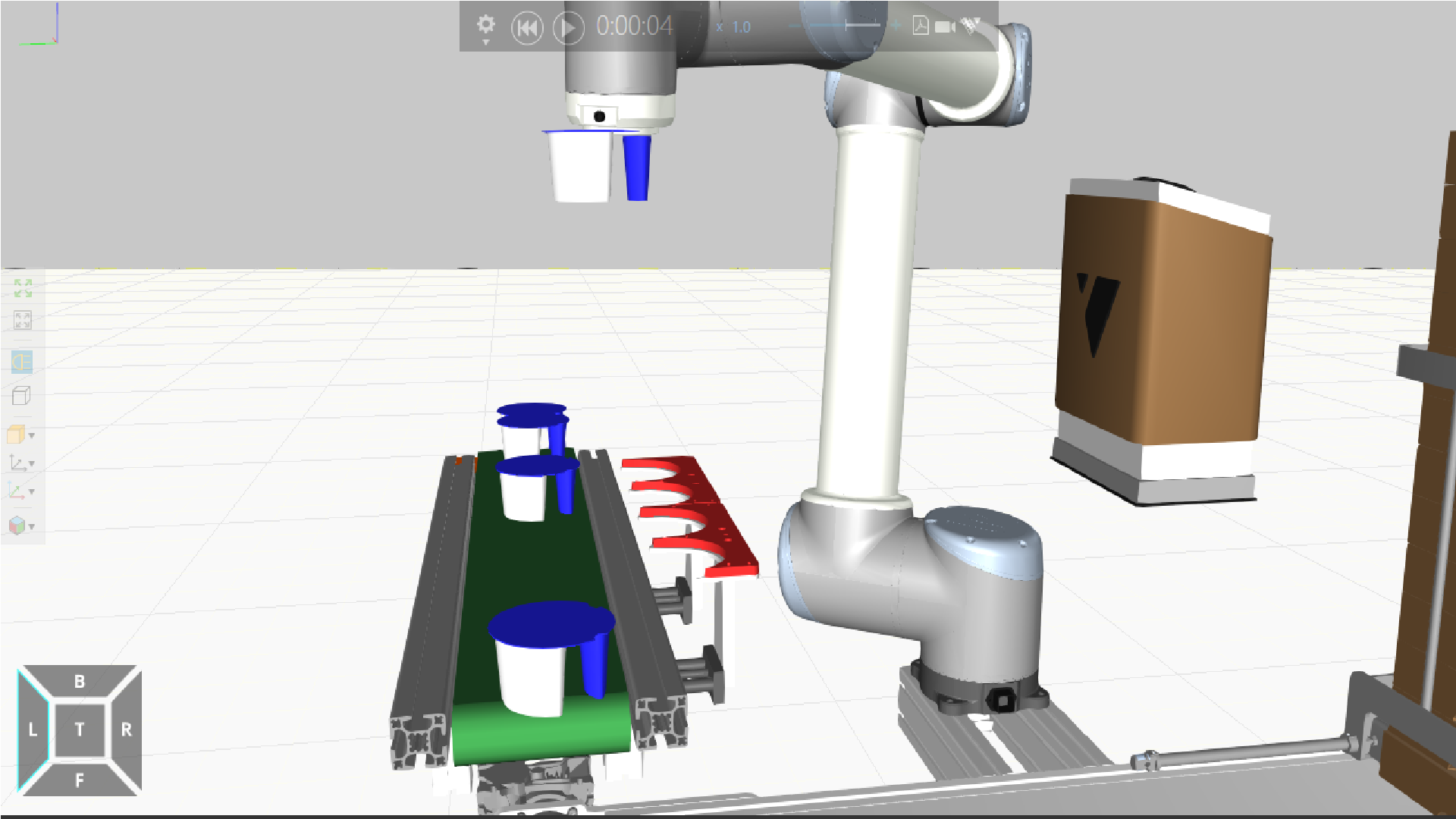
I will add a simulation for more understanding and some screenshots
The best way to approach this problem is to use GraspActionWizard Plugin. Check it out. You also have to define a Link Connection property in order to be able to move the cylinders along the horizontal axis.
Perhaps you can check the topic that I published some time ago. I was having the same task - to grasp parts with a stationary gripper which is controlled with an output signal from the robot.