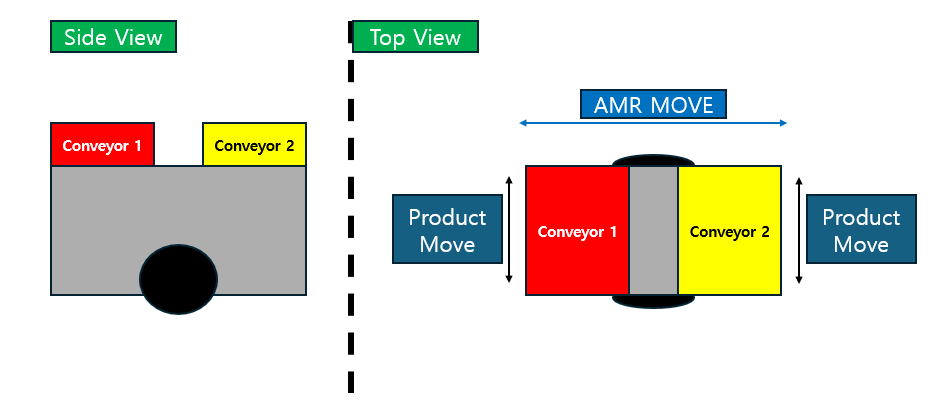
I am trying to configure a mobile robot with two conveyors mounted on top of a straight‑moving AMR. The conveyors’ operating direction and the AMR’s moving direction are arranged in a cross layout. Do you know how I should set this up? In my current configuration, the AMR’s moving direction and the conveyors’ operating direction move together.
Take a look at the link below, you can play with the resource approach, resourceoffset and transport links to model the AMR such that the product direction is perpendicular to the AMR transport direction.