omnidirectional AGV.vcmx (6.9 MB)
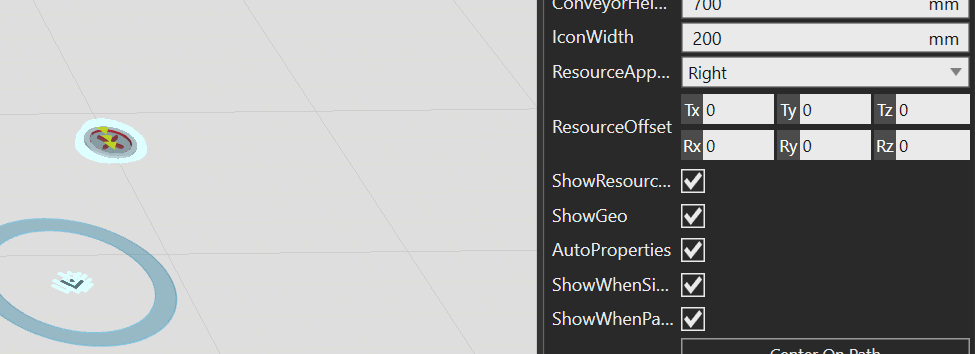
Something like this? You can customize the resource approach and resourceoffset (Rz value):
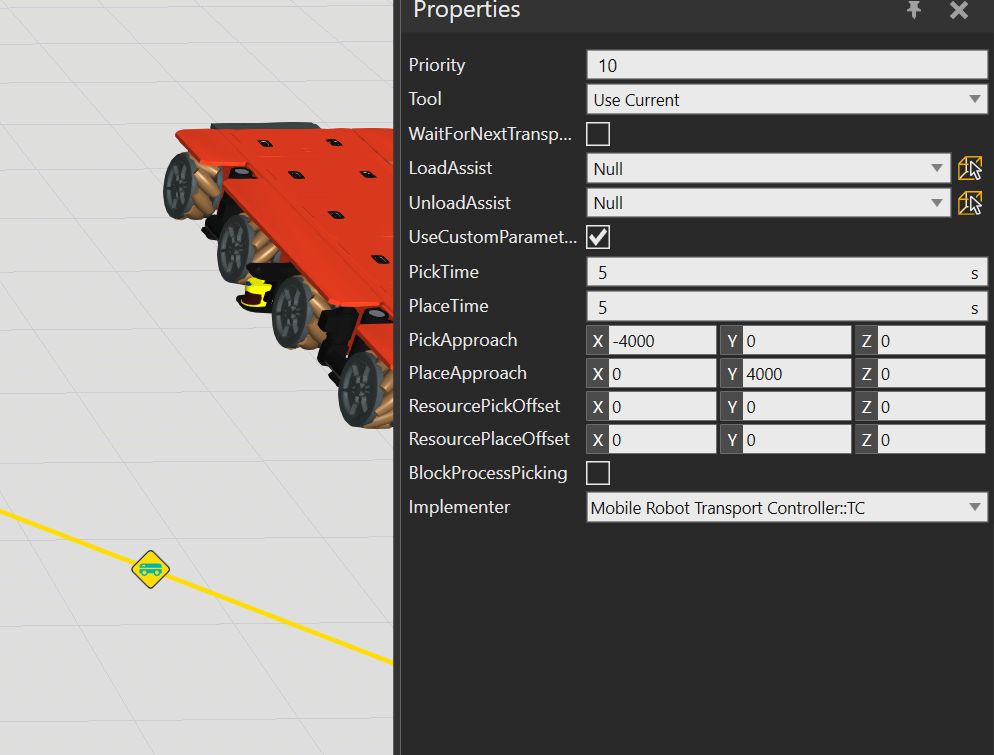
Together with a custom transport link (X/Y approach):
omnidirectional AGV.vcmx (6.9 MB)
Something like this? You can customize the resource approach and resourceoffset (Rz value):
Together with a custom transport link (X/Y approach):