Hi
I am building a model in Process modeling where the mobile robots should have omnidirectional capabilities. Does anyone here have modified the mobile robot scripts so that they can drive like that? Or solved it in another way?
Thanks
Hi
I am building a model in Process modeling where the mobile robots should have omnidirectional capabilities. Does anyone here have modified the mobile robot scripts so that they can drive like that? Or solved it in another way?
Thanks
Hi
Did you ever figure this one out?
Regards
omnidirectional AGV.vcmx (6.9 MB)
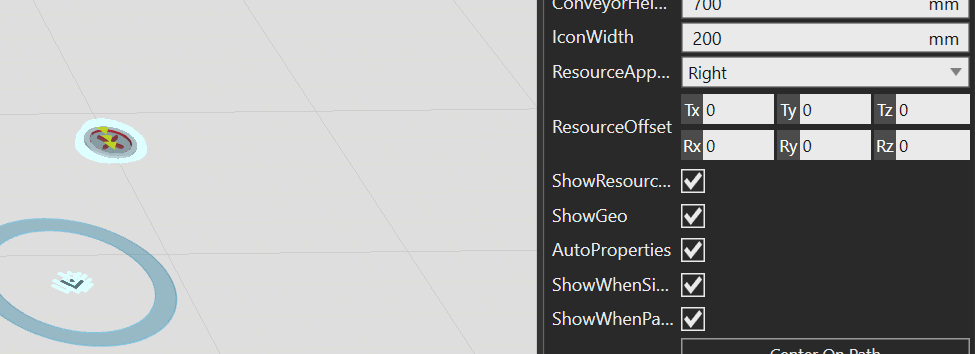
Something like this? You can customize the resource approach and resourceoffset (Rz value):
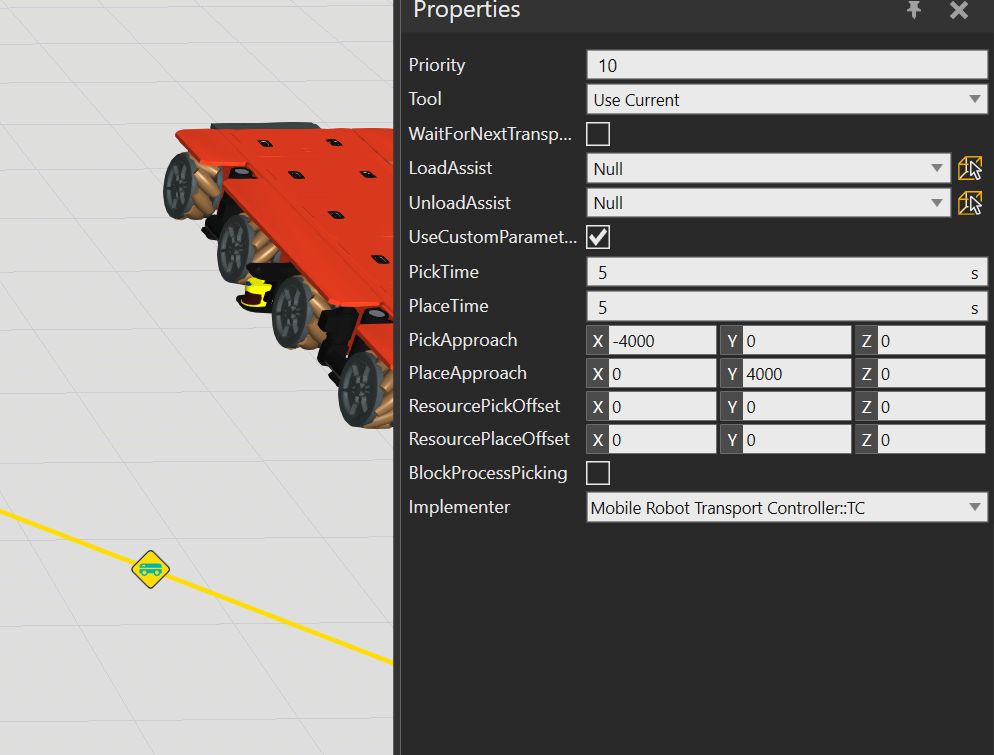
Together with a custom transport link (X/Y approach):
Nice! Spot on. Thanks a lot Jesper.
BR Jakob