Mobile Robot resource has been updated to support carts. There’s a new component in 4.9 eCat under PM Tools called Cart. VC Mobile Robot is compatible with this component and you can attach one or more carts to it.
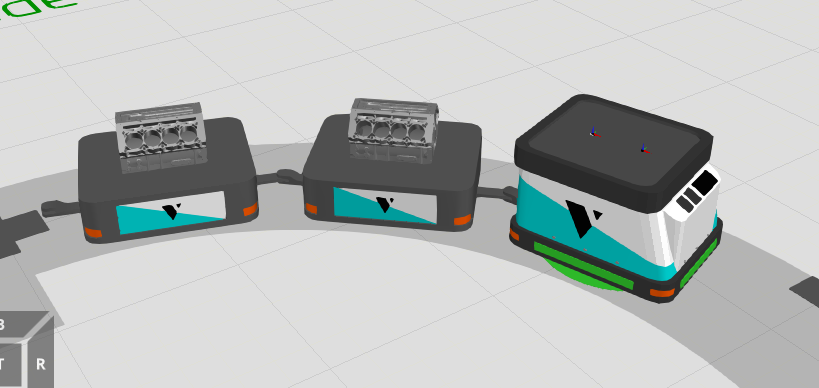
Cart works similar to other PM Tools. You need to connect it to transport controller’s tool interface and after that you can allocate transport tasks to it using ToolName property in transport links. Enter the name of the cart component to ToolName to specify certain cart or use CurrentTool option to use the next free cart for a transport.
Cart can be connected statically to MR using PnP or it can be connected during runtime as other tools. Note that you need to increase MR capacity (Transport::Capacity property) to allow multiple products to be transported on the connected carts.
PM missions has been updated with two new task types, CollectTool and DeliverTool. This gives you more control to connect and disconnect carts during simulation. Note that collect tool works for one “train” of carts at the time and you cannot pick up multiple individual carts.
By default cart has kinematics for towing (Towed property). Kinematics calculates the tow angle based on parent’s position history. In order to work kinematics script needs time samples at frequent intervals similar to physics behaviors. This means that speeding up simulation increases time sample interval and after certain point script doesn’t simulate the angle anymore but the connection is rigid.
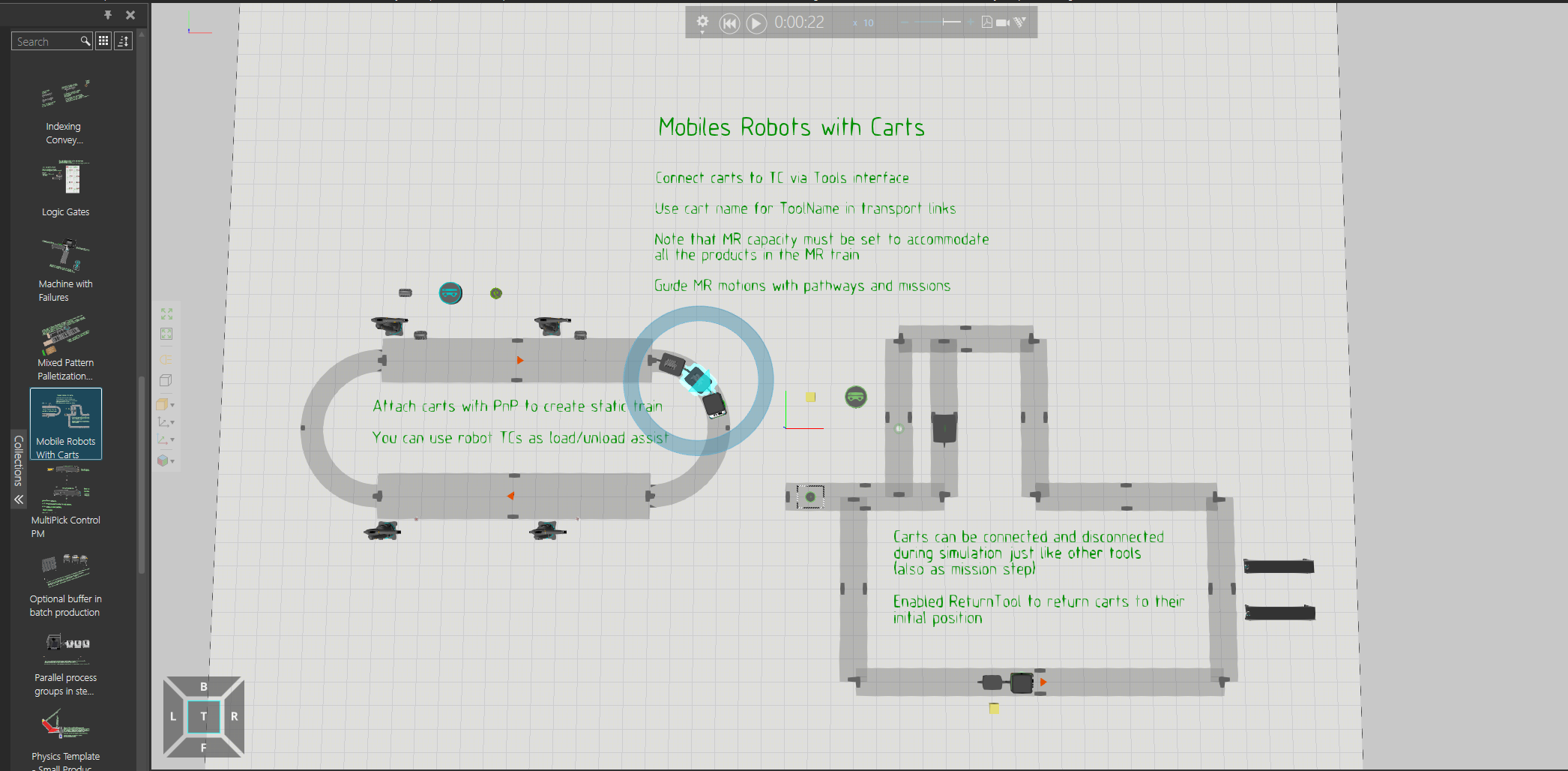
When using carts you need to pay attention to MR motions so that the carts don’t get tangled. You can use pathways for this and also missions. At processes the resource location means the location of the MR itself. However you can enable OffsetResourceLocation property on the carts in which case the MR tries to align “overshoot” the resource location and tries to align the cart with the target location.
Following video shows an example workflow for using carts with VC mobile robot.
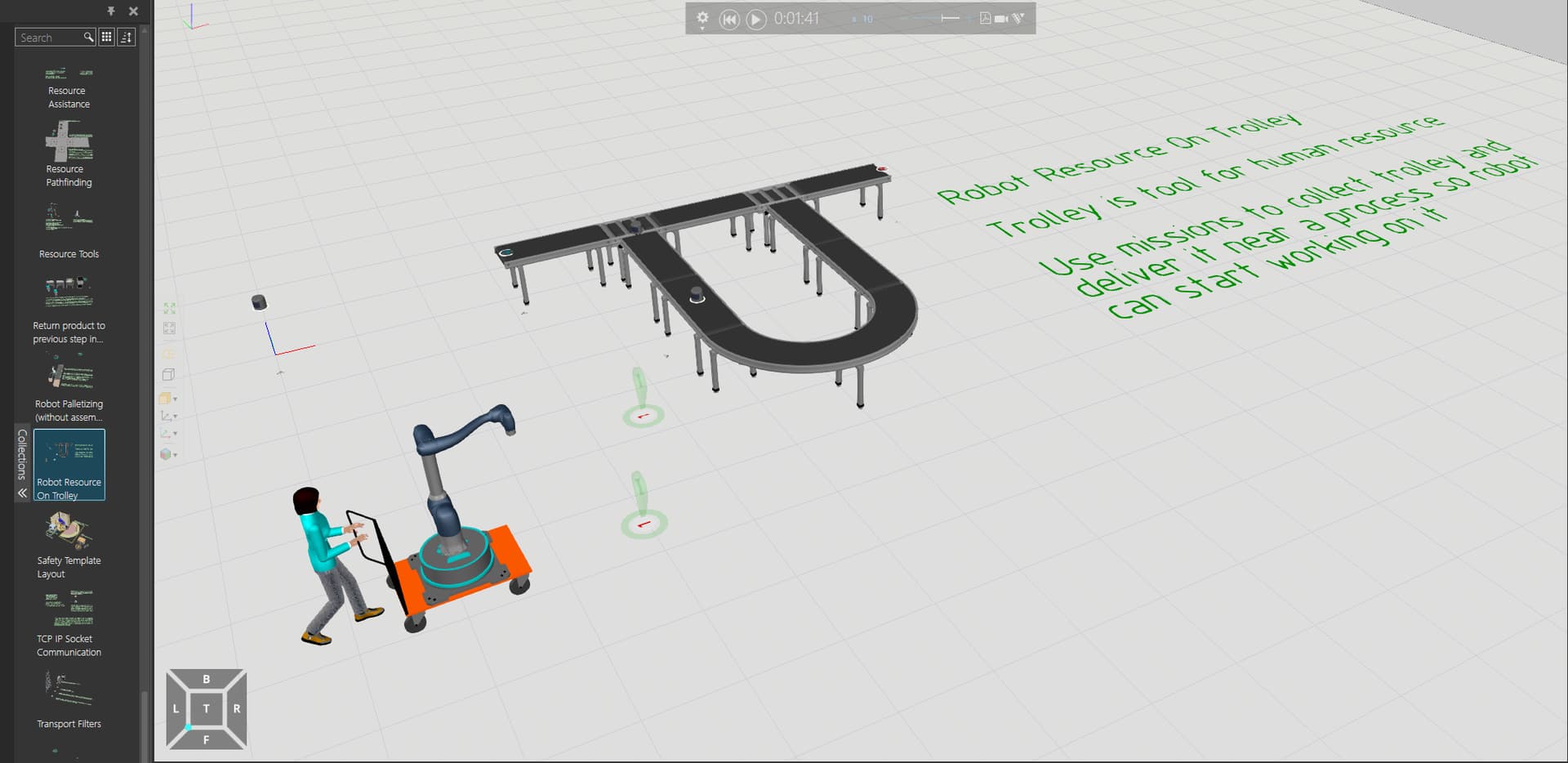
In eCat under Layout templates there are few new layouts as an example.
Mobile Robots With Carts has two different setups using carts:
Robot Resource On Trolley isn’t showing MR carts but it demonstrates the new mission tasks to collect and deliver tool. Use case here is for human to deliver a trolley to a process when a signal is triggered. There’s a robot resource on the trolley that can work on the process after trolley has been delivered near it.