I would like to ask in the process modeling, after the robot hand grabs the workpiece and places it on the machine tool, the machine tool starts to work. I use moving joints to make the machine tool work, but then it can not be multi-axis linkage, is there a way for the machine tool to perform multi-axis linkage?
Another problem is how to set the parking point after the robot grabs, and editing in the program seems to have no effect.
Can someone please answer it for me?
Thanks in advance.
Thank you for taking the time to answer it for me. I have solved the robot’s approach. Do you know how to carry out multi-axis linkage of machine tools in the technological process?
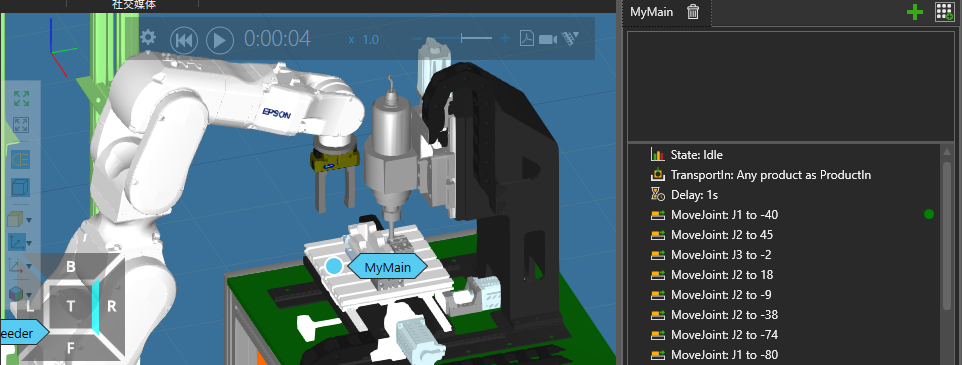
It means that the joints of the machine tool move at the same time. It is not that another joint is moved after the movement of one joint. In this simple example, after the robot puts the part up, the three joints of the machine tool move at the same time. This is controlled by a script. Can the new version of the process flow achieve the simultaneous movement of joints?
If you wanna do something like that i think you should use a second executor.
It could be a dummy executor that only used for second link movement.
So in second executor you can check for property updates and syncronize with master executor.
Thank you for your idea. After adding the second actuator, I use a delay to control the working order of the robot and machine tool. Can the process and program exchange variables or signals?