If you work with KUKA robots in KUKA.Sim (Add On) or KUKA OLP, this Python add on adds some functions that can make your life easier:
-
Import of $config.dat file properties (Base/Basename, Tool/Toolname, LoadData)
-
Save and load signal connections of a robot (e.g. if you have to manually exchange a robot)
-
Mirror position statements (for mirrored parts etc.)
-
Adapt position statements with a relative offset or absolute values for selectable parameters of the statements (Coordinates, external axis values, …)
-
Adapt Tool or Base of selected statements without changing robot pose in those statements
-
Add an input to a component. Connect a Boolean signal to this input to show or hide the component while the simulation is running
To install the add on download the zip file below, then unzip the package and copy the folder “kuka_sim_extensions” to the MyCommands folder of your simulation software. The MyCommands folder should be located in your personal documents folder.
Example:
C:\Users\%username%\OneDrive - KUKA AG\Documents\KUKA\KUKA.Sim 4.10\My Commands\Python 2
(be aware that the path might be slightly different on your system, due to language settings!)
kuka_sim_extensions_V3.1_2025-03-27.zip (1.6 MB)
You can find more detailed information regarding add ons and how to install them in the Visual Components Academy
EDITS
EDIT 2023-10-27:
- New version V1.1
- Changed folder structure of add on
- Fixed some issues in Save/Load Signal Connections
- Added features
- Helpers/AdaptStatements
→ select multiple statements and adapt various parmeters of those statements, e.g. ablolute value for an external axis or a relative offset for a coordinate
- Helpers/AdaptStatements
NOTE:
- There still seem to be other issues in Save/Load Signal Connection
__
EDIT 2023-11-03:
- New version V1.2
- Fixed bug in Save/Load Signal Connections
__
EDIT 2024-06-17:
- New version V1.3
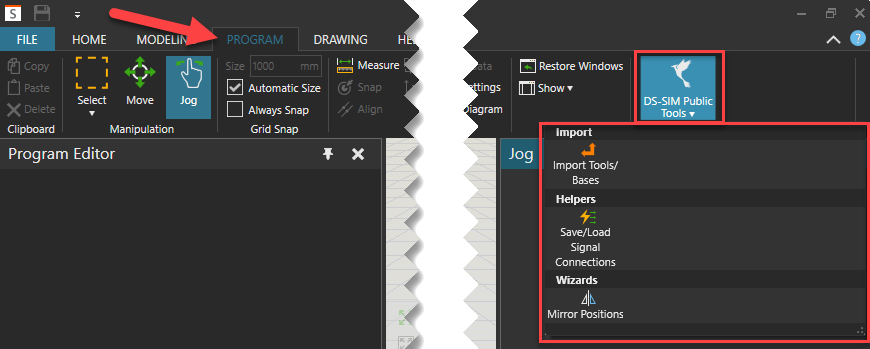
- Import Tools/Bases (PROGRAM / DS-SIM Public Tools / Import)
→ enhanced support for various syntax in config.dat regarding HOME positions - Added functions
- Change Tool/Base (PROGRAM / DS-SIM Public Tools / Helpers)
→ Adapt Tool or Base of all selected statements without changing robot pose in those statements - Show/Hide component via Signal (MODELING / DS-SIM Public Tools / Wizards)
→ Adds an input to a component. Connect a Boolean signal to this input to show or hide the component while the simulation is running
__
- Change Tool/Base (PROGRAM / DS-SIM Public Tools / Helpers)
EDIT 2024-10-08:
- New version V2.0
- Changed package name to kuka_sim_extensions
- Changed package structure
→ therefore it is necessary that the folder name located in my commands is “kuka_sim_extensions” - older versions of this add on have to be deleted to use this version
- Added functions
- Visibility Assistant (MODELING / DS-SIM Public Tools / Wizards)
→ marking of invisible features with a suffix (suffix can also be deleted if necessary)
→ all marked features then can be set visible or invisible with one click
→ force all available features of a component to be invisible or visible
- Visibility Assistant (MODELING / DS-SIM Public Tools / Wizards)
Known issues
- Workaround necessary to make this work with VC 4.9.2
KUKA.Sim / KUKA OLP - DS-SIM Public Tools - #19 by mastu - Bug for German localization of KUKA.Sim and VC
→ It is recommended to set the language of software to English to use this add on!
EDIT 2025-03-05:
- New version V3.0 → compatible with Sim 4.10 (should still work for Sim 4.3)
- Be sure to paste the package in the “Python 2” sub folder (has been added for Sim 4.10)
e.g. C:\Users\%username%\OneDrive - KUKA AG\Documents\KUKA\KUKA.Sim 4.10\My Commands\Python 2 - same functions as before with some minor bug fixes
EDIT 2025-03-27:
- New version V3.1
→ Helpers / Save/Load Signal Connections now supports Boolean Map connections


