I have created an articulated robot model. With that robot I am trying to create Grasp and Release process model. To create this model I am following the following link:
But to configure signal action and tool frame I am not able to select any imported tool frame for gripper. As a result I am not able to move Tool(1) or TCP(1) r whatever from robot to gripper for snap and further steps. Moreover I am getting following problem “TCP/Tool” is not a child of “robot::Controller” flange nor root node. “robot” is invalid attachment point
I have attached gripper with my robot by “Attach” and “Snap”. Is this the correct procedure to attach gripper with a robot? Is the problem occuring because of that?
No, you need to have specific interfaces in your gripper component and then use PnP (Plug & Play).
It is probably much easier to take some existing gripper from eCat and modify it instead of making your own from scratch.
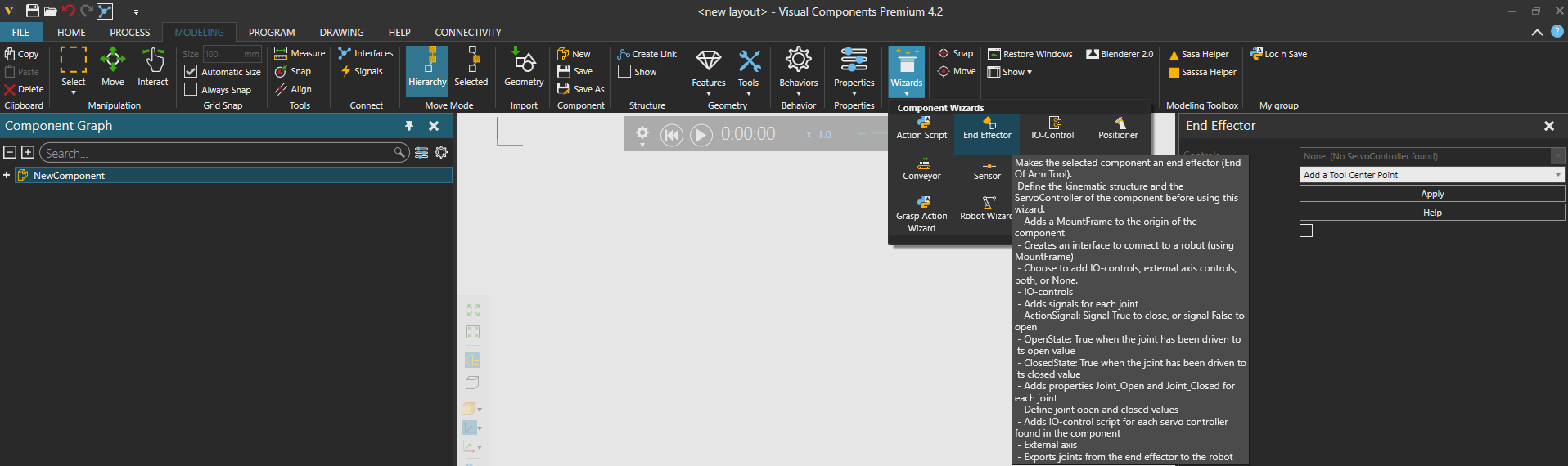
Would you like to explain of those specific interfaces or is it possible to provide any guideline or link to get understood which concerned interfaces I should work on my gripper components to attach with robot. Cause I used PnP but it didn’t work before.