the default robot position is always when i first time import it, can this position be modified?
Dear albert,
Please put a bit more information on your opening posts of a topic, we cannot read your mind on what do you mean and we do not want to go through all your posts to get the context.
br,
Lefa
Hello albert,
I don’t quite understand what you mean. The position of the robot after reset (it should be said that basically all components) is subject to the state when you click to start. Before you click to start the simulation next time, the reset state is the state of the last playback(the first time is the default state).
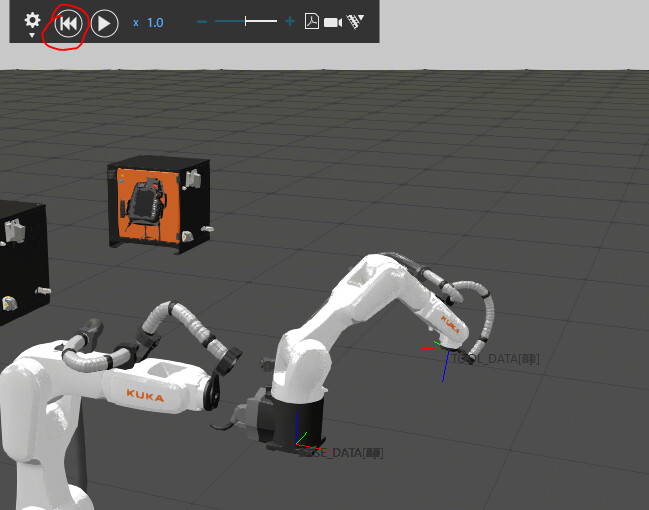
OK, when i click this red circled button, the robot will go to a default position, same as the left robot, but i want to change this default position, how can i manage to do this? thanks !
Could you check this topic?
Good ! exactly what i need, and now understand the function of save state. thanks for your quick response!