As u can see i want to attach the black plate on to the white block in the program so that they become one but in the program i cannot find any attach statement
i want to do this because in the next station when i want to pick and place these two component together it misses the top one and grasps only the block for some reason i tried with grasping volume and multi grasp but still the problem remains so i thought i would attach them in the program if that is possible
Hi, @idkfa
Thankyou for the solution
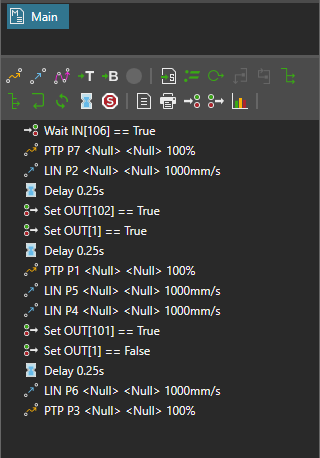
I see that you have used an attach statement which seems to be there in the program editor of yours but it is not there in my case see picture below
there is no attach statement here
i dont understand how you got it in the program editor, did u write a separate code for it?
also what are those documents you attached, are those codes if so what are those codes for ?
Just so know i have zero knowledge in coding
so please suggest something other than coding
Thank you
The file given by chungmin is a plug-in developed based on Visual Components. Usually you only need to unzip it to “My Computer-Document-Visual Components-4.X-My Commands” to use it.
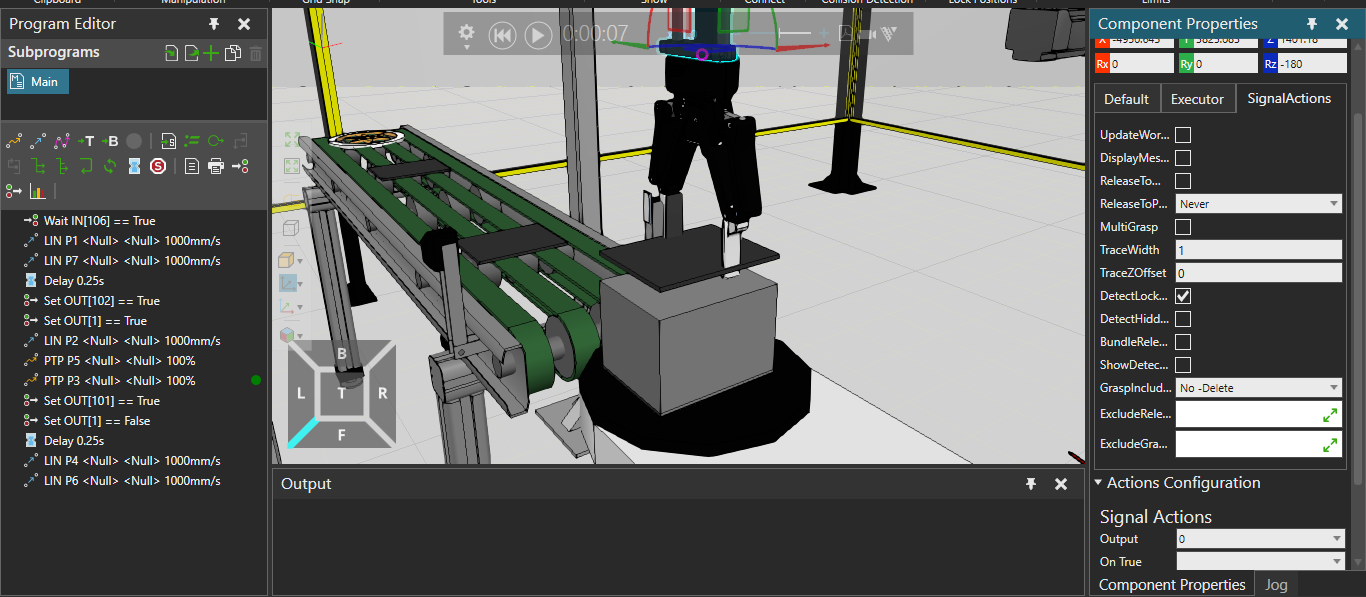
At the same time, I noticed that the picture you provided shows that the tool you are using is a robot, which means that you do not need additional functions, you only need to release the component. If it cannot be attached to the correct location, please check the Actions Configuration Under Signal Actions, select the Output[1] you are using, and adjust the Gravity direction attribute under Release. The function of this attribute is that when the falling edge of the signal is triggered, the robot will check the components at this distance by default and attach the release component to Check the component.
Hope this helps and have a nice day!
Just restart VC. When VC starts, it will automatically read the init.py added in the file for initialization. Generally speaking, the init.py file will contain information such as the called script, the name and identifier of the script, and the location where the script is placed.
Hi, please help I still dont see this option in program tab.
After I add a command script manualy to robot. It is creating this new command every time I restart the simulation and it works only once
What version are you using, at the moment it looks like 4.8 and above, they have a new program editor that makes it possible for them all to fail to run, the solution is to modify the corresponding init.py.
In my case the attach statement does not appear, i have tried restarting and adding the second version of it but none of them work. How can i do so the attach statement icon appears? I have VS 4.8 OLP.
This is a problem specific to the OLP version, because the bot editor in the OLP version is special and the original plugin can’t be inserted into it properly, what you have to do is to modify the init file and change the location of the plugin:
Note, the SVG part in there, requires extra files, and while it won’t cause a fatal error, you can just delete the last element in the addMenuItem if needed.
This is the message where the error is:
File “file:///C:/Users/DANILA/Documents/Visual+Components/4.8/My+Commands/CreateAttachStatement/init.py”, line 10
cmduri = getApplicationPath() + ‘CT_WaitPart.py’
^
IndentationError: expected an indented block
I’m sorry, what I’ve given you may be in addition to the problem, in fact, you just need to add the indentation of the application to the code under OnStart, I’ll update it.