My problem is similar to this older one. He said that “configure required number of ‘dummy joints’ in the controller properties”. But I couldnt understand or do that in 2025.
Anyway I programmed a path with UR10e (6 joints) and I want to use that path with another robot with 7 joints, which is Kassow1410. Obviously VC doesnt allow it. Can you help me with any solutions that possibly might work?
make sure you have the TCP perfect and a defined UFrame then post the program in a Rectan format. This Rectan should be able to be imported into a different robot as long as same TCP Tool and UFrame are defined. The joints can be messed up, but you can work through and have same path. I have done it many times.
Im still new to Visual Components. Its not perfectly clear for me what you mean under “post the program in a Rectan format”. What is Rectan? How do I “post” it?
All I found inside the program is “exporting in xml”.
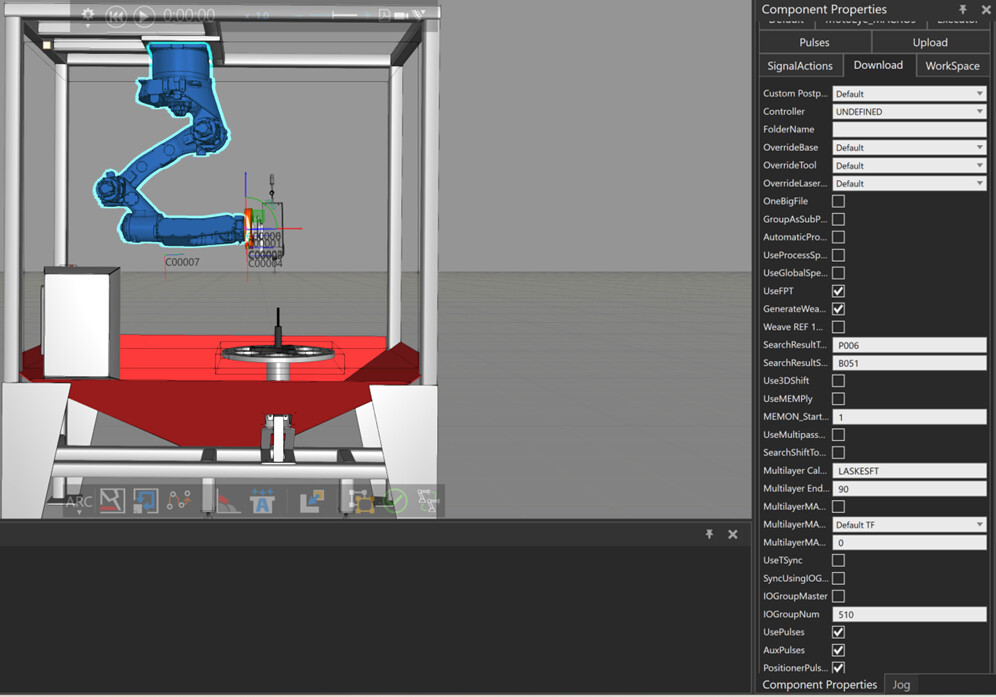
Once you Download a program it will show you all the variables in the Component Properties. If you “UnCheck” the three at bottom right corner that have work Pulse, then the Post will be in a X,Y, Z (Rx,Ry, Rz) format (Rectan)