How can I change the property of an object through robot programming.
Not possible directly as VC’s robot programming is intentionally limited to something that is feasible to post-process to a real robot. I think you would need to use robot output signals and Python scripting.
I tried this but it didn’t work…
from vcScript import*
comp = getComponent()
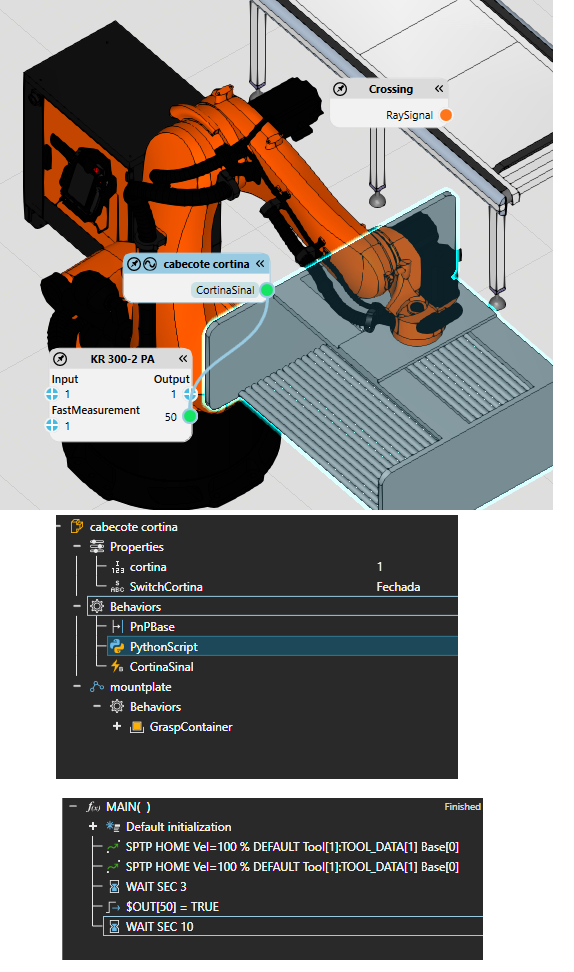
sensorSignal = comp.findBehaviour(“CortinaSinal”)
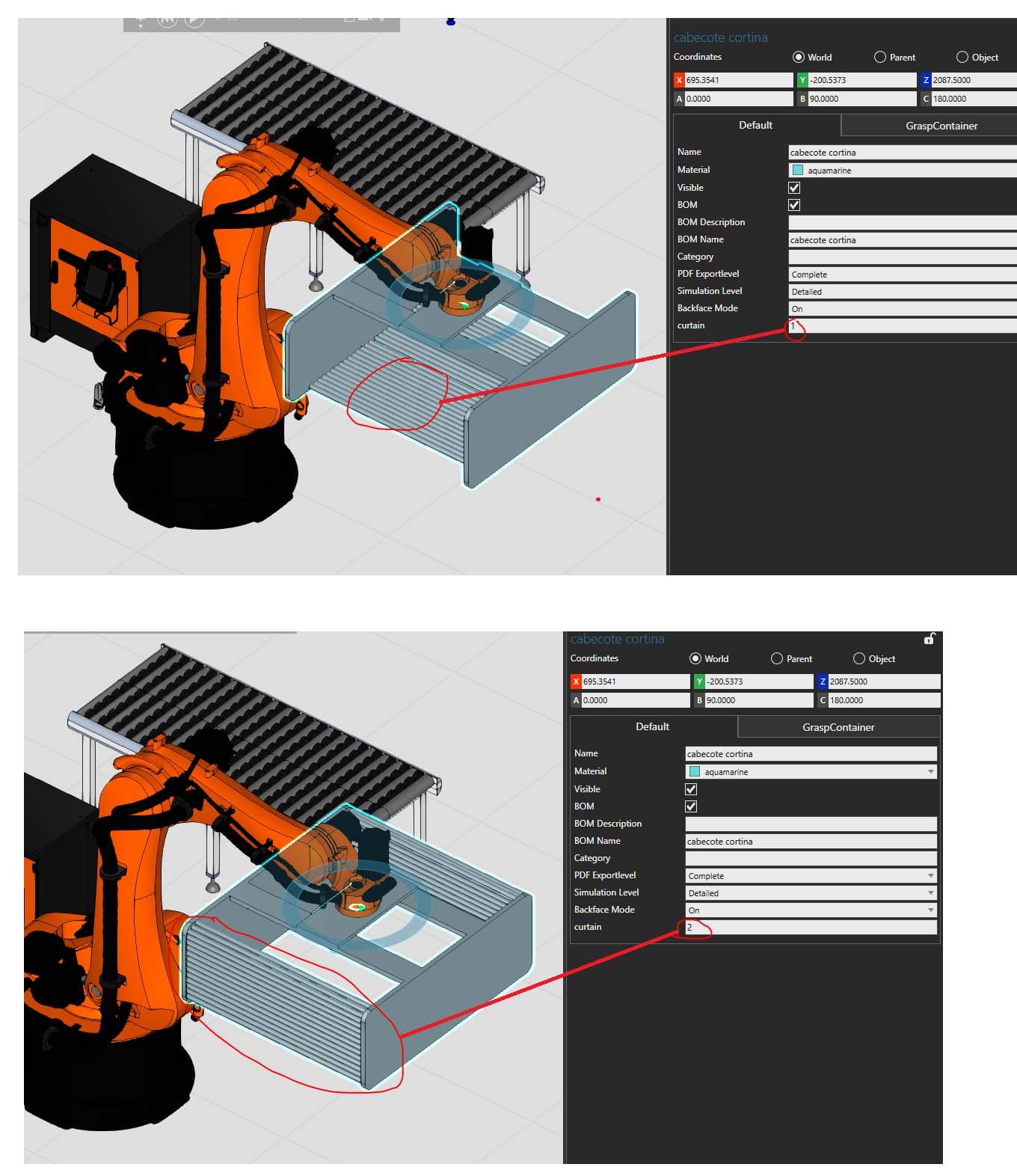
prop = comp.getProperty(‘cortina’)
prop.Value = 1
triggerCondition(lambda : getTrigger() == sensorSignal and sensorSignal.Value == True)
prop.Value = 2
Did you connect your signal to the script behavior in the Script behavior’s properties panel? Also then you can use OnSignal() in the script instead of triggerCondition.
1 Like
I did it
Thank you very much for your help, it was very important to me.