I made a Cartesian robot, but when it picks up an item, it always picks up the item from another direction automatically, how to pick up the item from a specific direction?
Maybe this can help you
https://forum.visualcomponents.com/t/robot-gripper-location/5083?u=bad
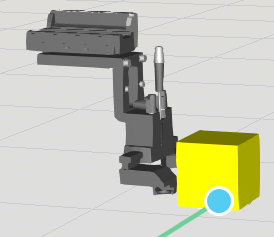
Thank you so much, I have followed your advice to modify, now the direction has been normal, but it appears another problem, the pick and place position seems to be incorrect as follows, do you know what is the reason?
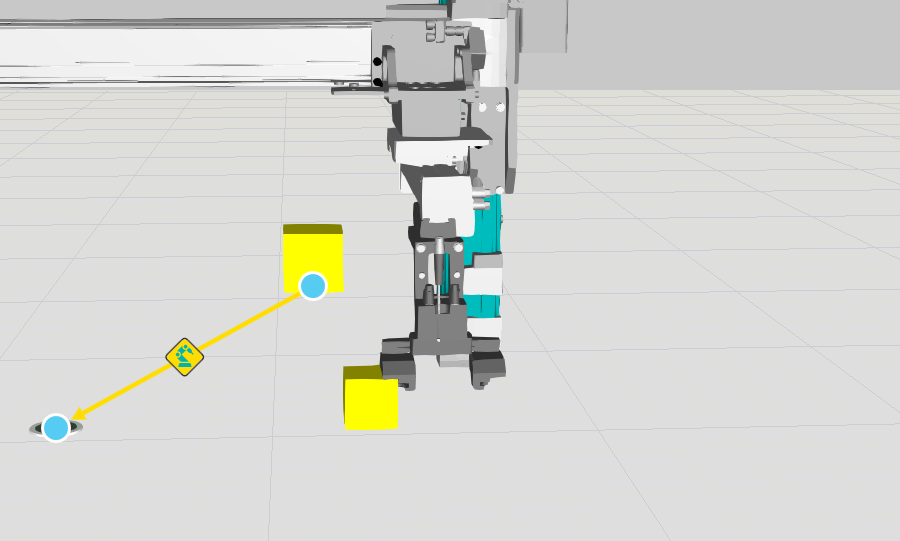
It seems to be a problem with TCP, you can check the position of TCP. Hope it helps you.