i’ve got a problem with my robot in pm. In the process, i am cutting large metal round bars into pieces and want to process them in a spinning machine afterwards. The problem is the way the robot takes the cutted piece to put it in the machine. Is there a way to alter the way the robot grabs the piece in pm? I tried to do it with different position frames but nothing seems to work.
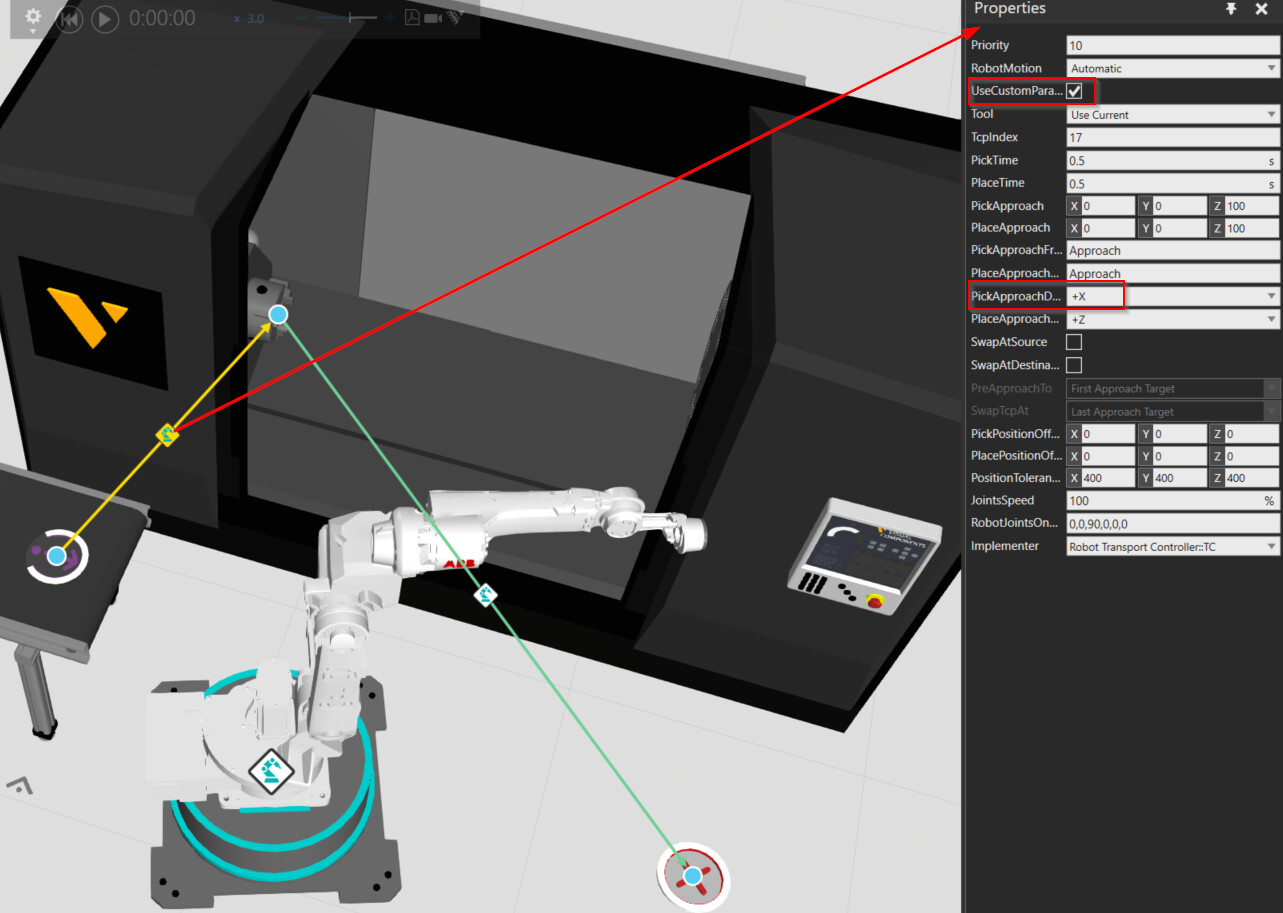
In addition to Este, I recommend putting your origin at the base of the product, z axis pointing upwards (align product’s z axis to world z axis.).
This way, as default, gripper will grasp the product from the circular profile of the cylinder.
This would save the extra work required for editing each transport link.