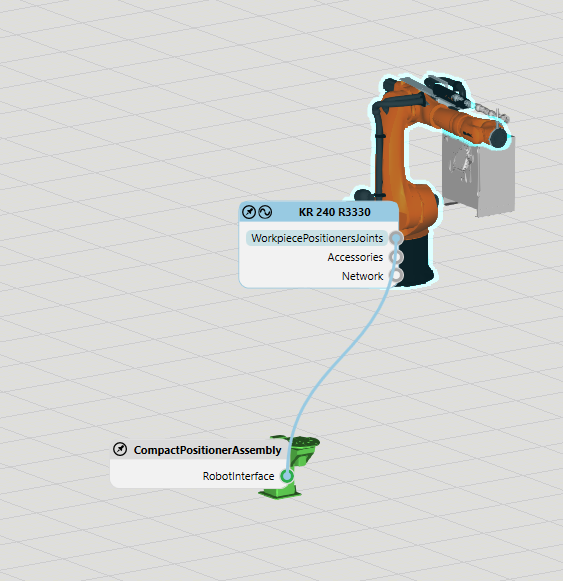
Hi I need help with my program. I have a robot in it (unfortunately it has to be KUKA) and a workpiece positioner and my task is when the robot gets into position the workpiece positioner has to move as well. It just doesn’t work for me at all and the values of the workpiece positioner are written in the program but when I run the simulation it doesn’t work.
Thank you for any help
Testing.vcmx (9.1 MB)
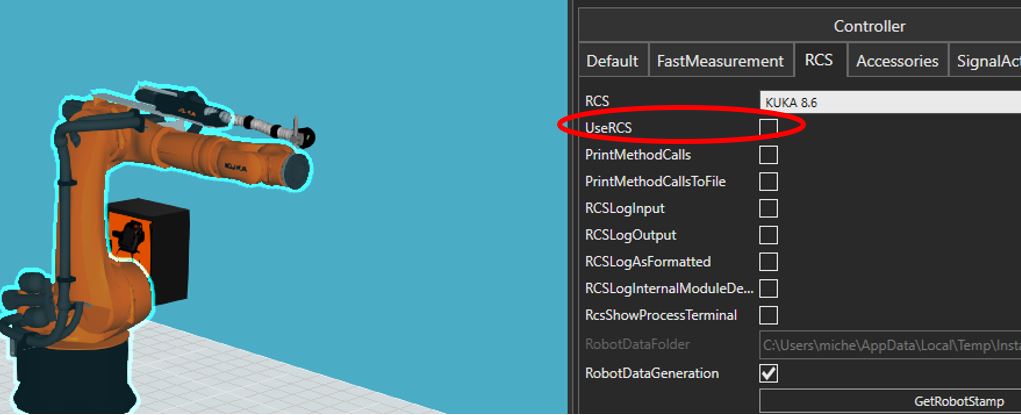
Hi thank you for your reply. Yes, I have it checked (UsRCS) in the settings. And when I’m in the program and I click on (for example P1) everything works I run the simulation and it doesn’t work. But I want to ask KUKA robot has only input (image) can’t be a bug there.
Thank you for your help
when I open your simulation, when I disable RCS, the program runs correctly
Hi yes it works for me too, I misunderstood you sorry. But I would like to ask you that by unchecking UsRCS the kuka robot will not lose its controller. Because I have to simulate with RCS.
Thank you
Hi, by unchecking the “UseRCS” the robot will run without the Machine Data (MADA). That means that the path planning and the cycle time will not be as on a real robot, but with the dummy values of the VC model.
To run the simulation with the RCS you need to create the MADAs in WorkVisual first - as they will be in reality. Then you can import the MADAs in KUKA.Sim/VC by unticking the “RobotDataGeneration”-Box and selecting the MADAs in the “RobotDataFolder”. You can find a little demo of a robot positioner in the attached Video (it will be a similar process for your workpiece positioner):
If you don’t want to do this whole process, I recommend using a standard KUKA positioner for example the DKP_400_V2 and the MADAs will be created automatically, as they are already in KUKA.Sim/VC.
Hi thank you for your reply. It looks quite complicated ![]() and I don’t know if I could handle it since I have been working in kuka.sim for a very short time. But thank you for your help
and I don’t know if I could handle it since I have been working in kuka.sim for a very short time. But thank you for your help
I can understand; WorkVisual is a complex world. Then just use the standard KUKA positioners in KUKA.Sim. They will do the job.