why does changing the base in the robot points move them completely? i am trying to use my own program in a workflow and i cant change the base
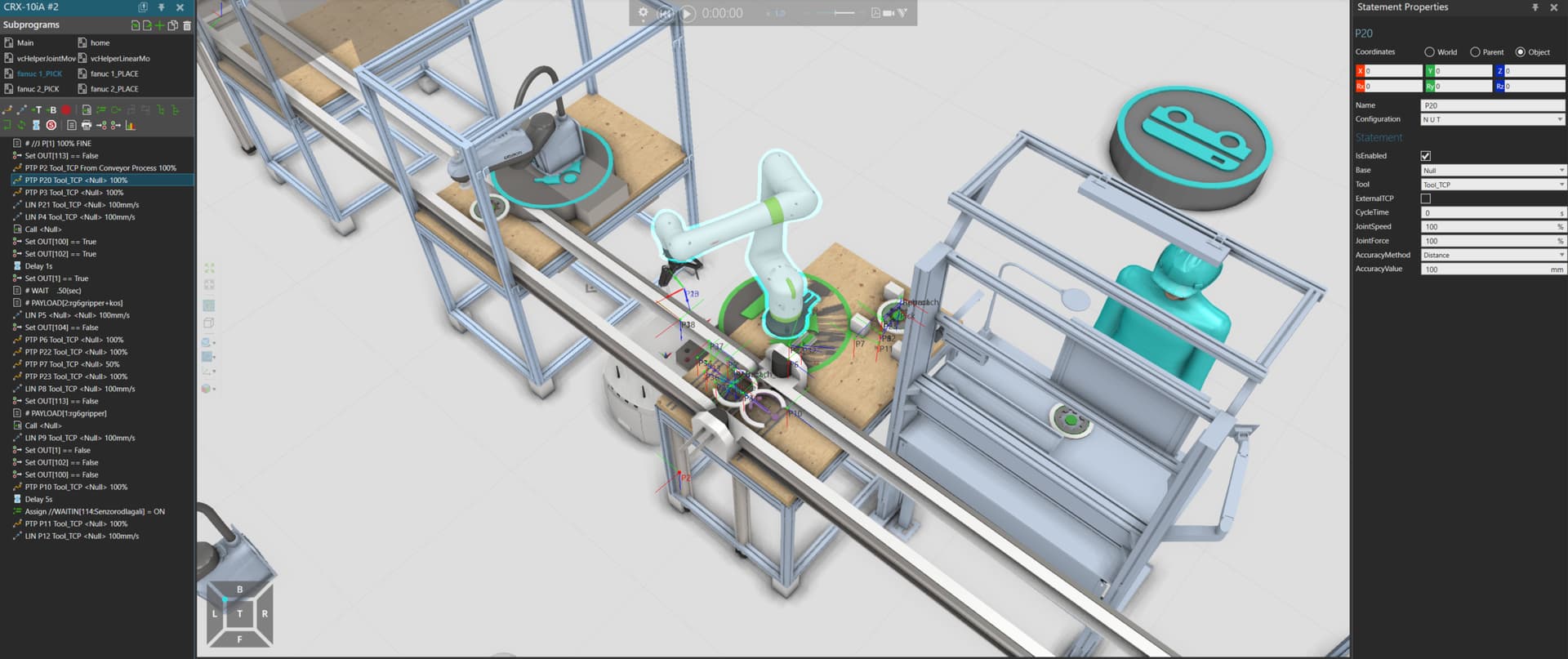
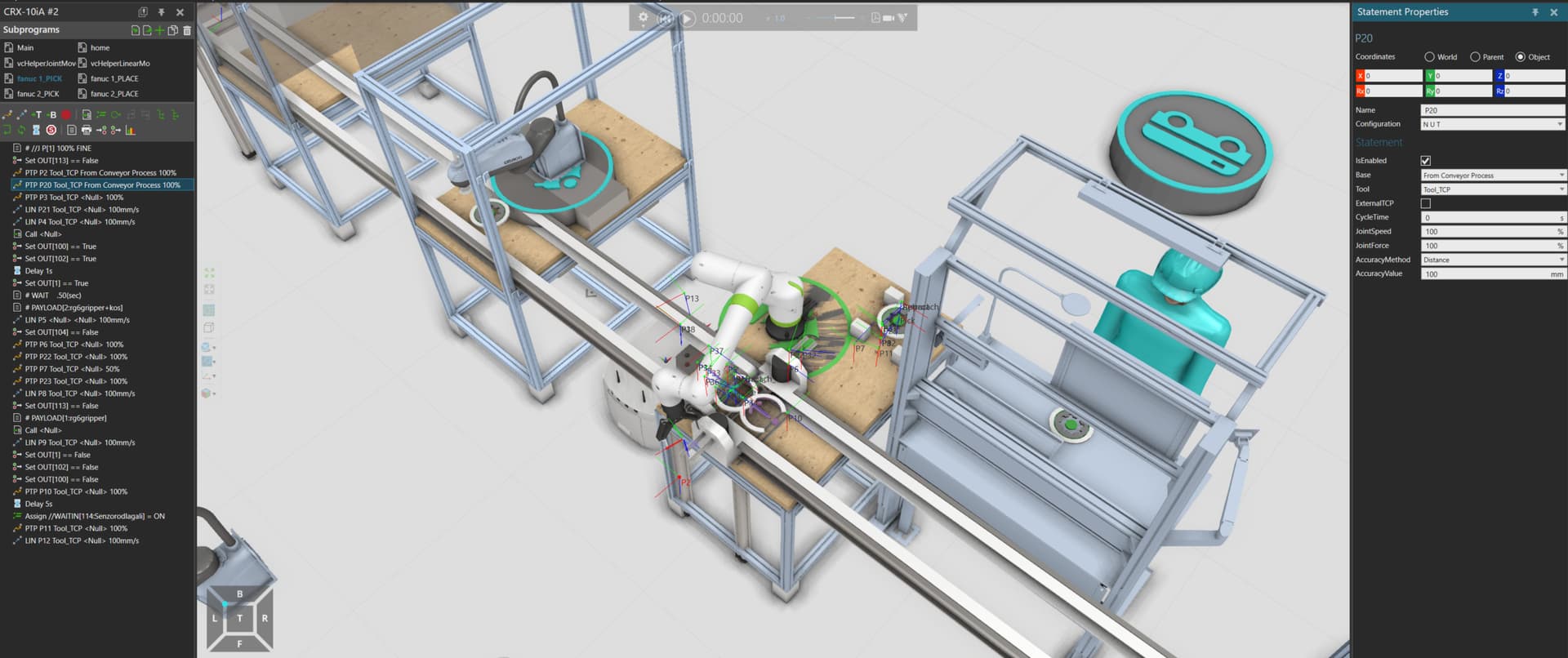
In VC usually the position matrix in reference coordinates is the master data and position in world is the derivative one. So if you change the reference (e.g. base frame for robot position) you will change the world position too.
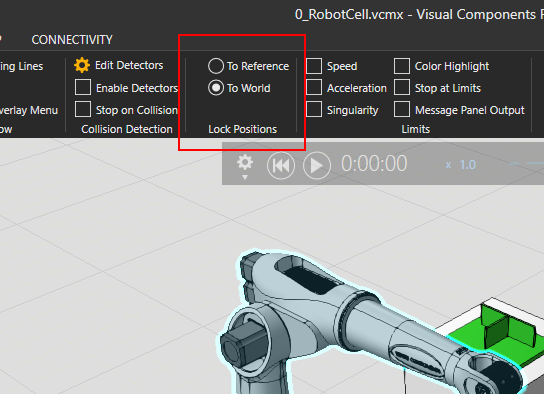
With robot positions you can enable “Lock Positions to World” and then changing the base should recalculate position in reference so that position in world is retained.
-k