Hi,
I have been wathcing this video: Simulate a Depalletizing Operation with Works Library - YouTube
in the video he assigns the task of the work component to the robot controller in the task list:
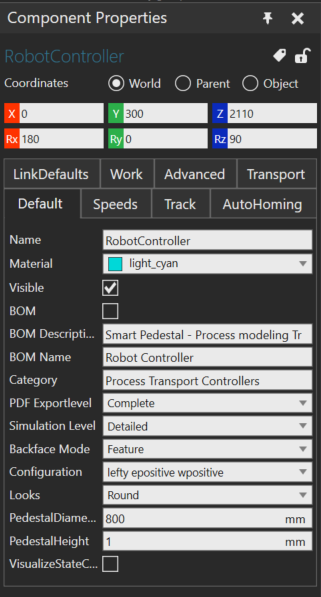
I can’t find the task list in my robotcontroller:
So how do I assign the pick task to the robot controller? I have created a “feed” in the work component.
Thanks!
anhu
November 23, 2021, 11:08am
2
Your Robot Controller is from category “PM Transport Controller”? (use this controller for process modeling)
For Works:
1 Like
ok, it worked. Thank you!
So I want the robot to pick my imported geometry, but i picks the geometry on the wrong place. Do you have any idea for how I can decide the pick position of the robot?
anhu
November 24, 2021, 7:00am
5
create frame in your part (name of this frame should be “pick”)
1 Like
Wow, it worked! Thanks! How do you know this?