Hi, I have a few robot sequences that are triggered externally via mqtt. While receiving the subscribed message, the a python script behaviour calls certain routines via the robotexecutor class. However, the simulation stops after executing some routines. How cant this be prevented?
are any of these options ON ?

Do you use an AccuracyMethod in any of your Motion Statements? If you set the Accuracy Distance to 20 for example and two statements are closer together than that, then your robot won’t know what to do and the movement will stop.
None of the options are ON and I am using only Linear and Point to Point Motion statements along with setting Binary Outputs On and Off for grasping and releasing.
Is it possible that one of the points in one of the routines is
#out of reach, or
#gets out of reach due to base change
after some iteration ?
No, all the points are relatively close to the robot and within the work envelope and there are no base changes
Yes i think it’s a bug. Simulation stops if robot code is finished.
If you take your code into ‘while True’ loop i think it won’t stop anymore.
But that beats the entire purpose of externally triggering robot sequences. I only want it to run, when I receive publish a message on an mqtt topic.
Thinking of it I could put a while loop and an If condition and change the value of the variable in the If condition using the mqtt trigger.
Old topic… But i had the issue on my simulations so i “googled it” maybe this can help another:
If your simulation says “Simulation stopped” as soon as you started it, check here:
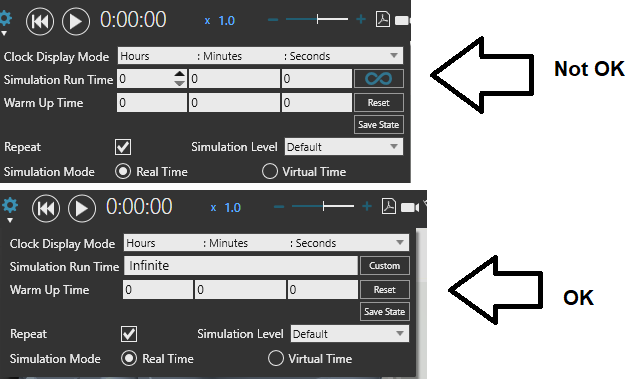
6 Likes
Thanks a lot. That was my issue for “Simulation has stopped”.
2 Likes
Thank you. That was my issue too”.
1 Like