Does anyone know how to have the robot wait for a certain amount of time when picking/placing to simulate the pick/place action? Currently, the robot just moves away immediately with the part.
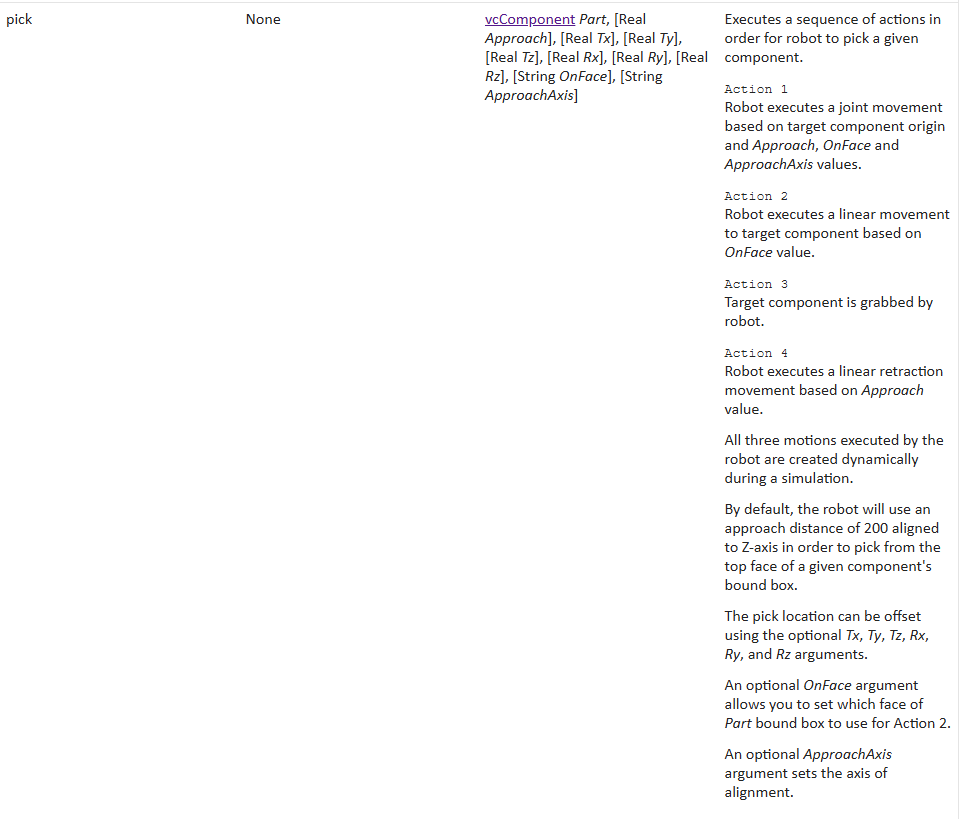
As it says in the explanation of the pick function, pick is a series of actions, not just one.
You can use the offset part of pick to make it so that it doesn’t go back to the approach point after grabbing, and then make your own delay() to simulate the effect you want. Of course, you can use other means to customize your own grabbing paths, but that would be slightly more complicated.
Yeah I was hoping there was some less cumbersome solution seeing that every pick-and-place action will require a certain amount of time in real-life applications.
I will just have to create custom grabbing paths since I do need the approach offset.