AMR.vcmx (192.1 KB)

Hello everyone!
I’m new to VC. Needing help on how to fix this problem!!
Thanks for reply. I tried to reset the P1 location.But as I reset the simulation, the P1 return to the original location. So how to set the P1 location?
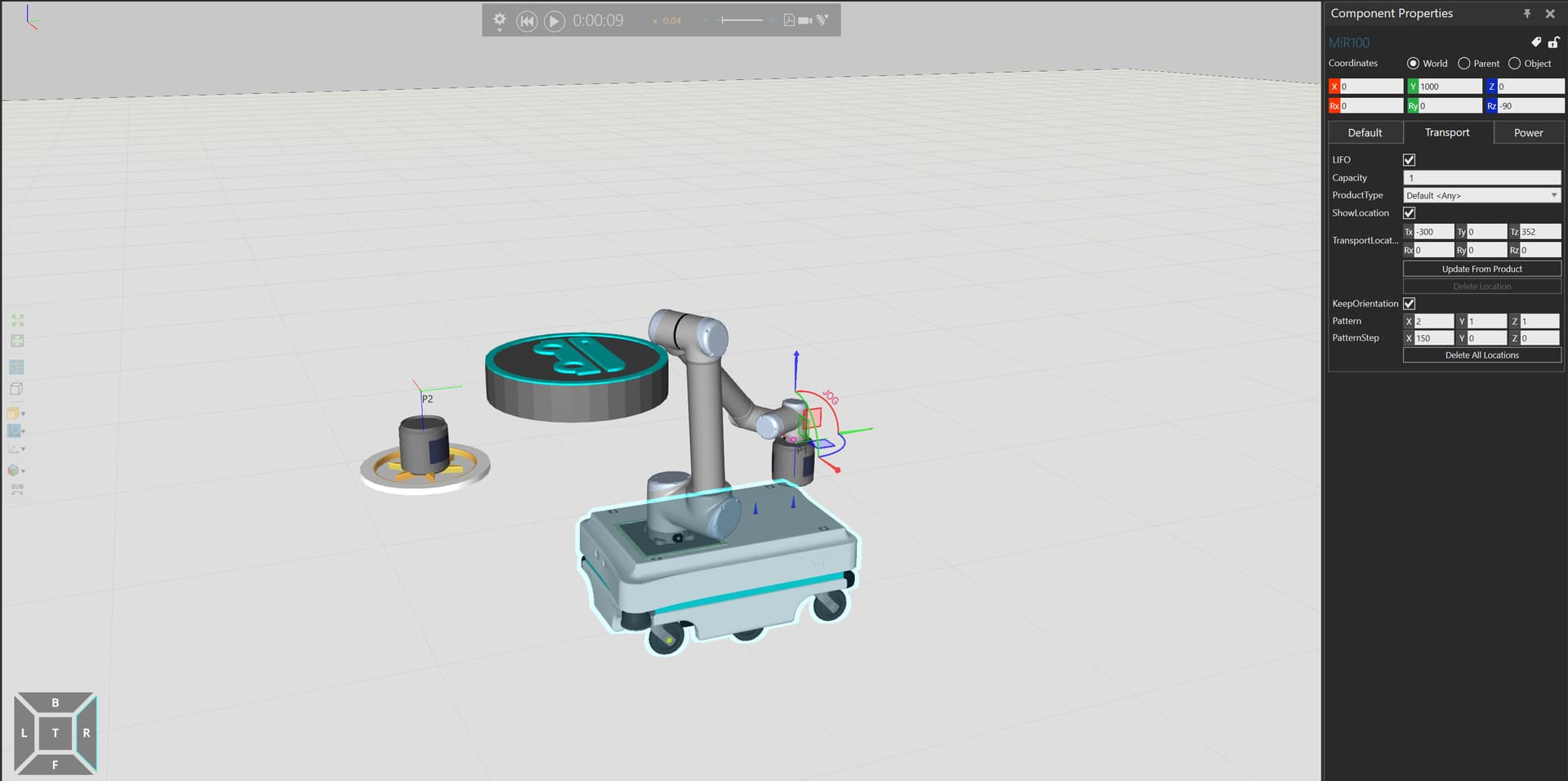
You need to change the TransportLocation of your Mobile Robot. You can see it on the right of the 2nd picture posted by BAD.
→ select the mobile robot, go in the Transport tab in its properties and you can change the TransportLocation
Thank you! I’ve got this done.