Currently i am only able to enter the maximum speed and acceleration inside of the link properties tab. also the function “servo.setMotionTime(x)” is not quite what i am looking for.
Changing the speed/acceleration while the servo is moving probably does not work.
Other than that, I would imagine it is OK to change these values while the simulation is running.
I’m currently reviewing this project. I did not succeed at the time. However I want to give it another try.
I know that you can set the MaxAcceleration and MaxSpeed from vcDof. I struggle however with the exact syntaxes. For example, i want to change the max speed of joint “Bx”. “Bx” is the first joint in servoBl. Current script:
I have got a follow-up question regarding this topic:
Right now, I am unable to program more ‘complex’ vt-diagrams in the simulation.
The basis of this problem lies in the fact that the Python script has a chronological order. I can only enter a new speed when a line in the code is completed.
In other words: I can only change the speed and acceleration when the movement from A to B is complete (v=0).
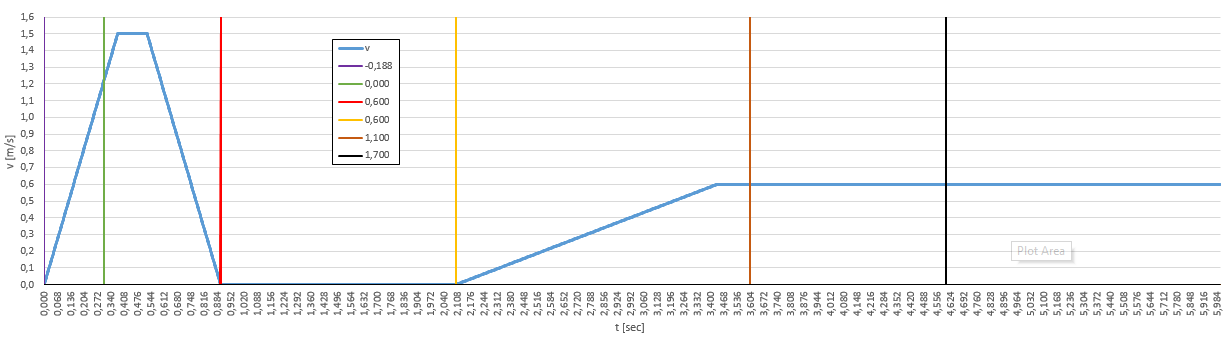
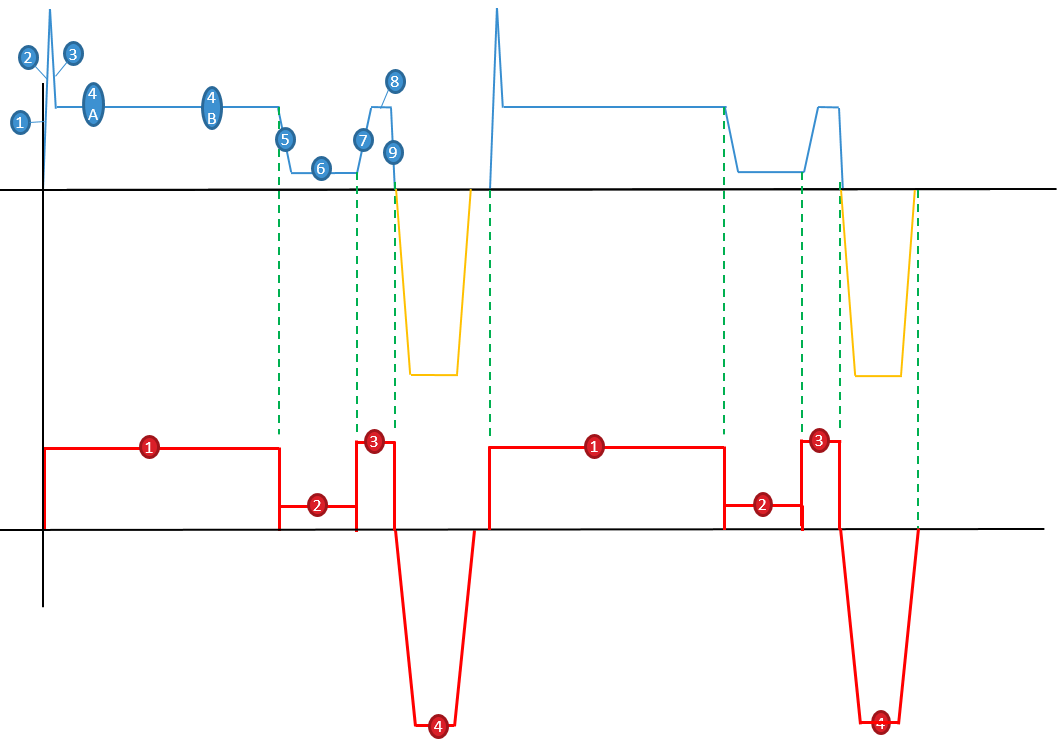
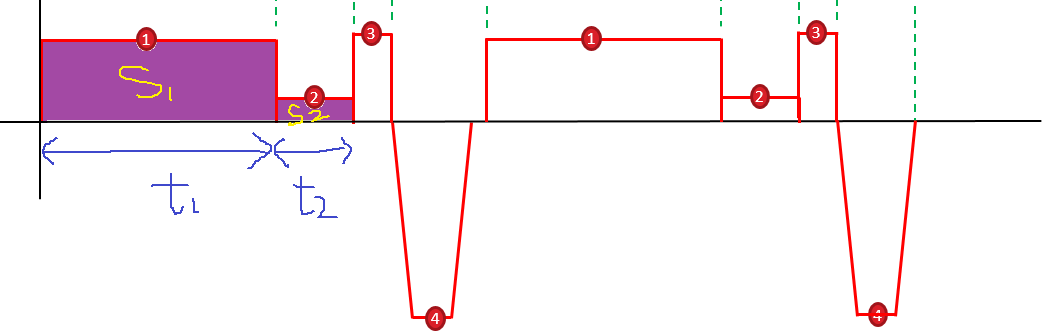
The image below makes it clear how I deal with this right now: the blue graph is the desired outcome. I have simplified this graph (red) and adjusted the speeds and accelerations so that the times match.
In the red graph you can see that I can change the speed from v1 to v2. For this I first have to go to a situation where the object is stationary (for a fraction of a second). This gives a fine approximation of the sequence, but not exactly what I am looking for.
Is there possibly any other way I can let objects and joints move according this graph? That is to say that I can adjust the maximum speed and acceleration while the object or joint is still moving. I have a suspicion the “servo.move()” function is of no use here.
Would it be an option to use consecutive (two-way) paths of which you manipulate the speeds?
A drawback would be that multiple similar paths are required when multiple components have to de/accelerate on the same path. But the implementation is possibly easier?