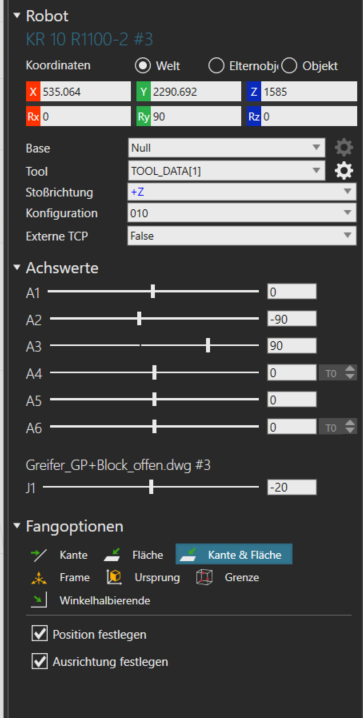
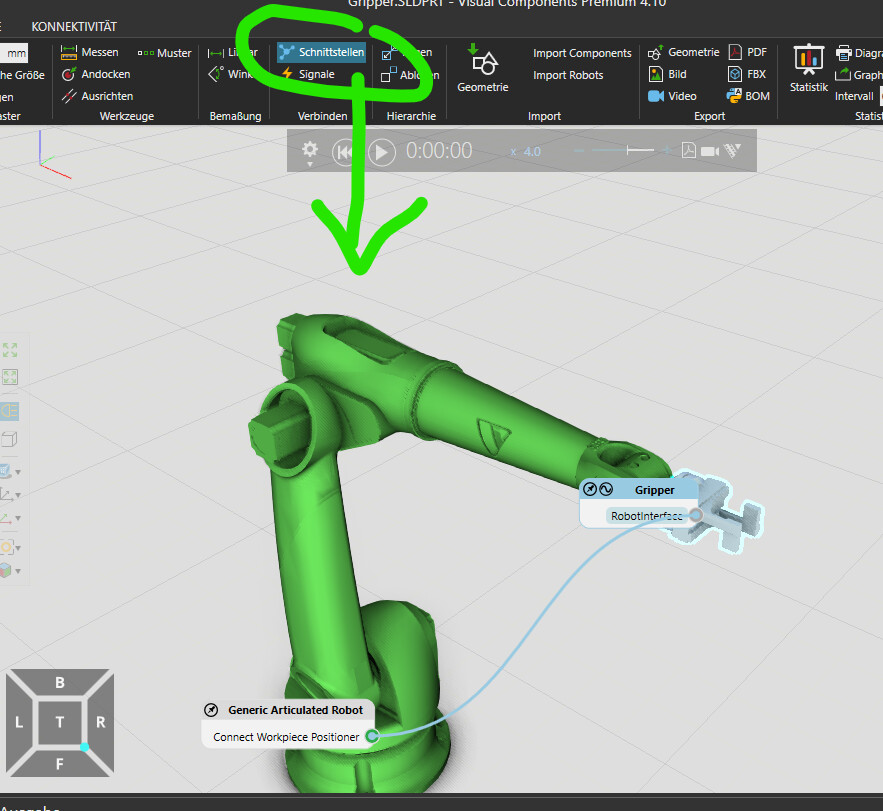
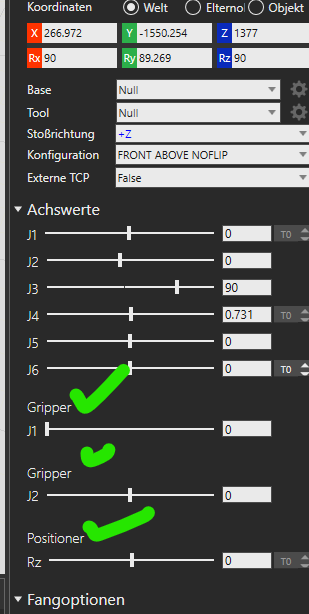
I would like to attach and use a self-imported gripper on a robot. This gripper has 2 translational axes, which I want to control via the external axis function of the End Effector Wizard. For this purpose, I have defined the gripper as an external axis and not as an IO signal. Unfortunately, I now have the problem that I can only control one axis in the robot programming and not both axes (in the picture below only J1 and not J2 is visible). Of course, I have created a servo controller for each of the two translatory axes.
Have any of you ever had a similar problem and can help me with this?
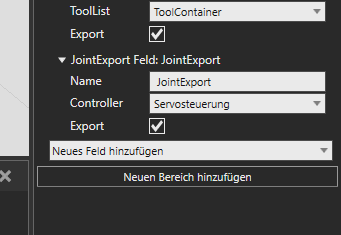
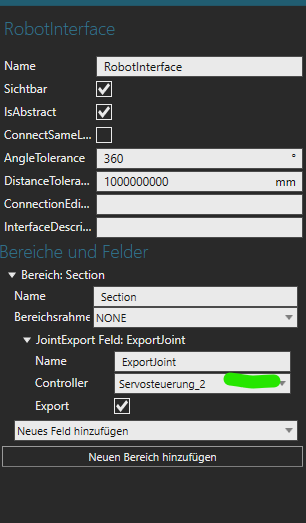
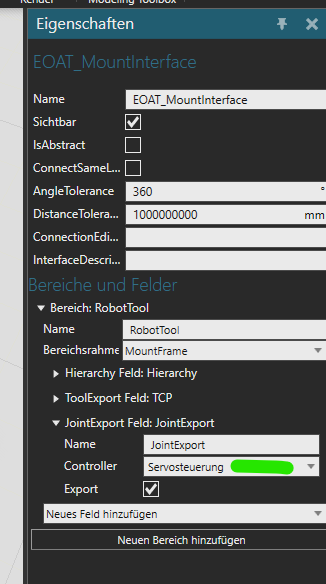
Yes, that’s right if you have two servo controllers, because in the interface “EOAT_MountInterface” to the robot only one controller can be defined in the field JointExport. Can you control both with one controller?
without changing the interfaces in the robot, I would simply use the end effector wizard for one servo controller and for the second servo controller I would use a second wizard, the workpiece positioner. So you have to create the physical connection once via PnP and then the abstract one again via interfaces, but then you control both with robot.
All right. I understand your point. Unfortunately, in VC I only have the option of connecting one object to the flange of the robot. So either the gripper or the positioner… Do you have a solution for that?