Hello,
i have done an Simulation with the UR robot 5e and the Robotiq Hand-E End-Effector.
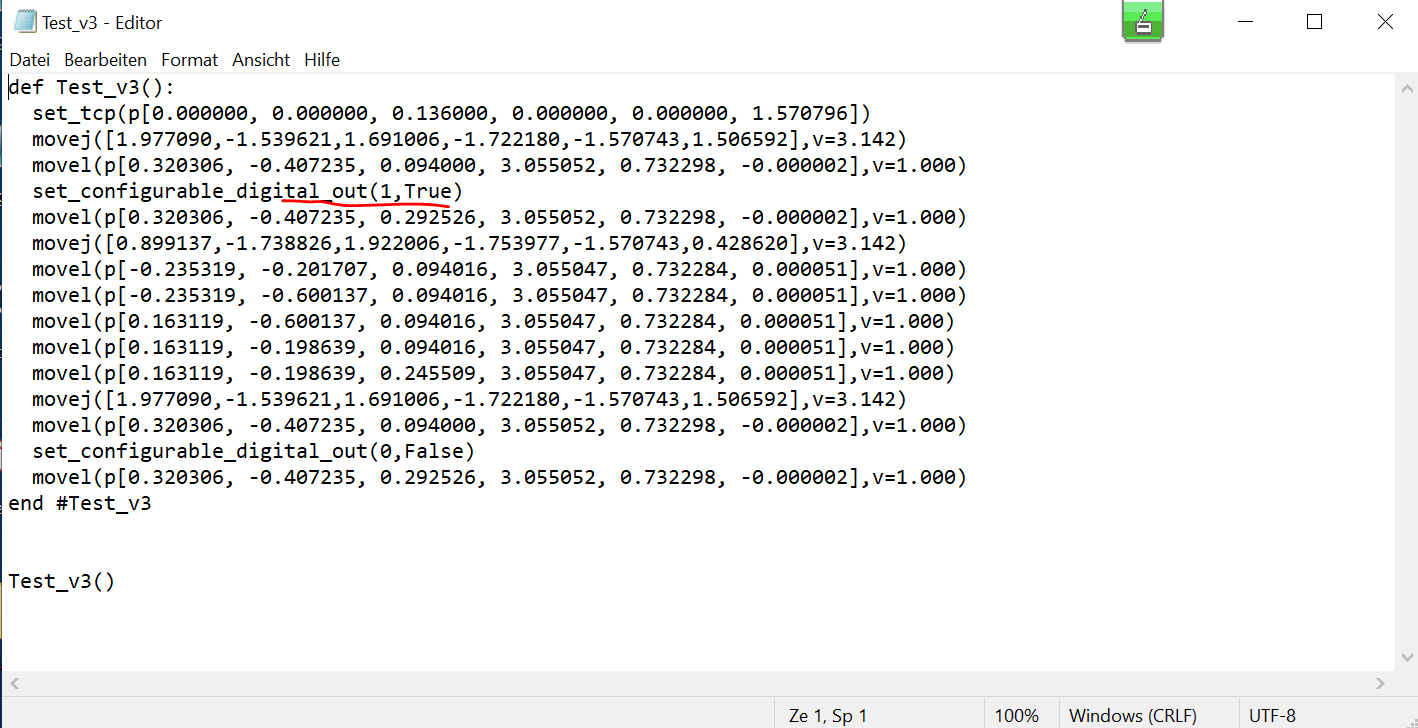
I exported the Robotprogramm as an Universal Robots Script, to test it on the Real Robot (also an UR 5e and Hand-E End-Effector).
But when i play the Script on the Robot the Gripper doesnt move. The Robot drives to the teached Points but doesnt activate the Gripper.
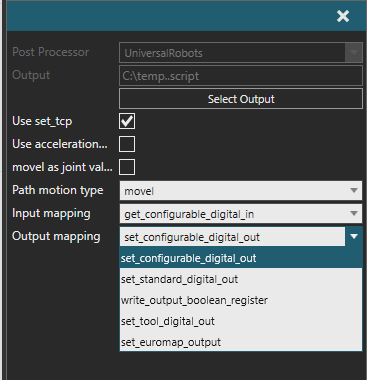
I also tested Port 0 - 8, doesnt work.