I hope to achieve such a function:
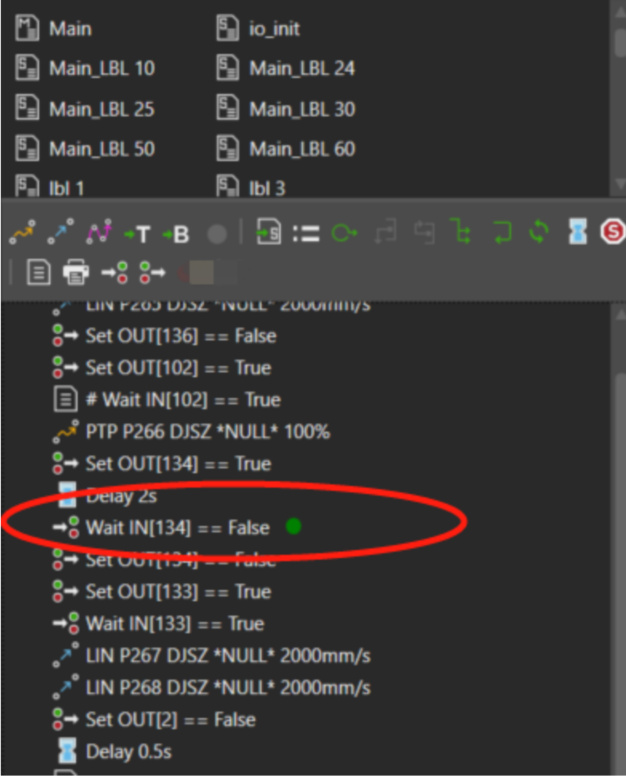
When the robot runs until a certain waiting condition is not established for a long time, the robot automatically exits the waiting condition, skips the next program, and jumps to the specified wait timeout statement for execution. I think the length of this wait timeout can be customized.
Can my idea be realized, what do I need to do, can you provide me with some solutions?
Do not confuse Wait Signal and Wait For Binary Input statements. Wait Signal is a process modeling statement that does support timeout. Wait For Binary Input statement does not.
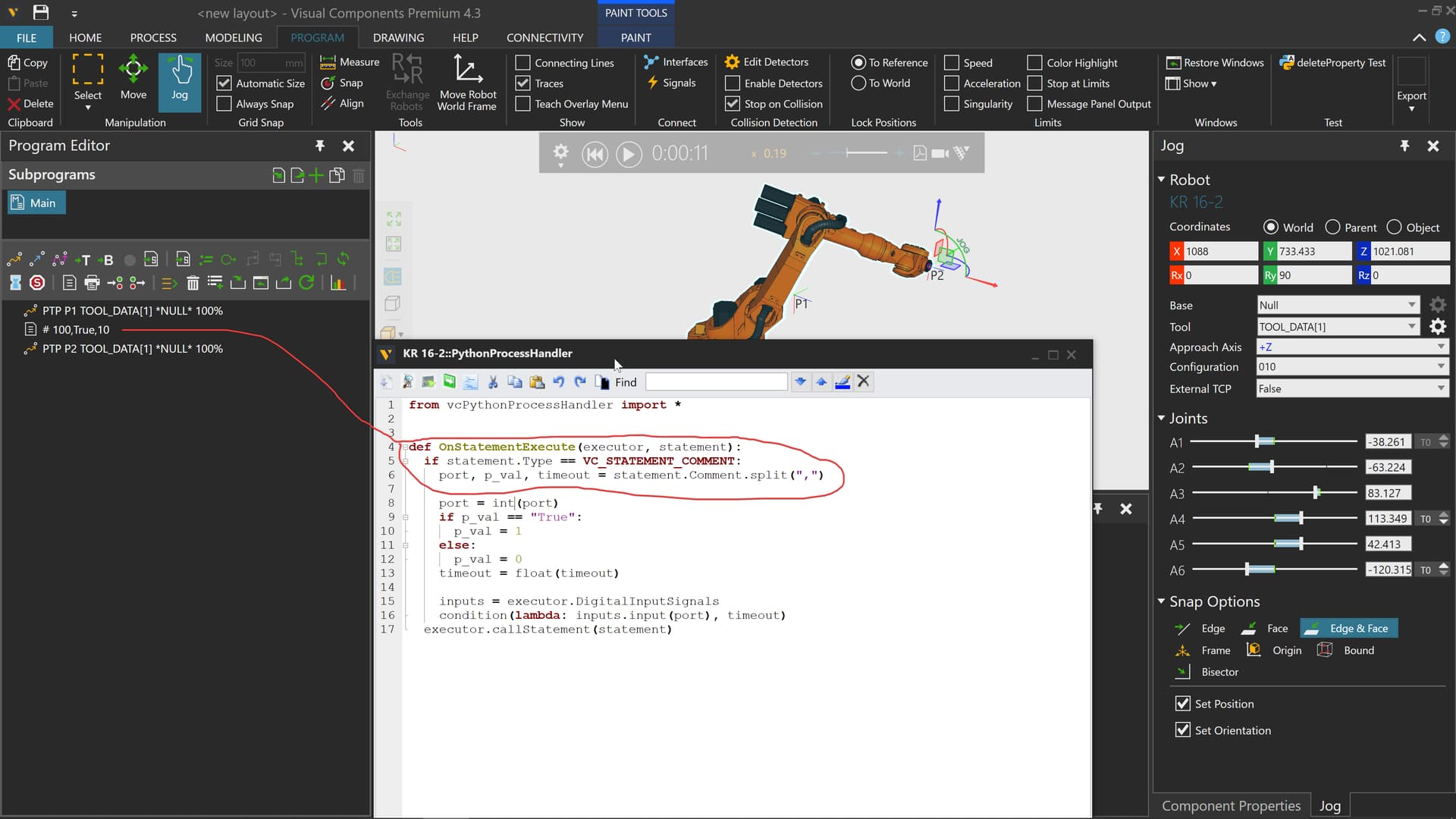
Some folks have been asking here for use cases not directly supported by the generic RSL statements. If you get stuck and have some Python chops, you can use a Comment statement and Statement Handler with the executor of a program to do a lot. This is simple example of wait timeout, and the script is very bare bones. For example, properties can be added to a statement to make filtering easier or add prefix in the Comment property to id a particular case the statement is meant for.