I wish for workpieces to be loaded onto the two positioners and the robot arm to weld on each side. I have created a short program using the positioner on the right which runs perfectly, however when I connect the positioner on the left without creating any welding programs using that positioner and run the simulation, I receive an IndexError about the handler_script_unencrypted.
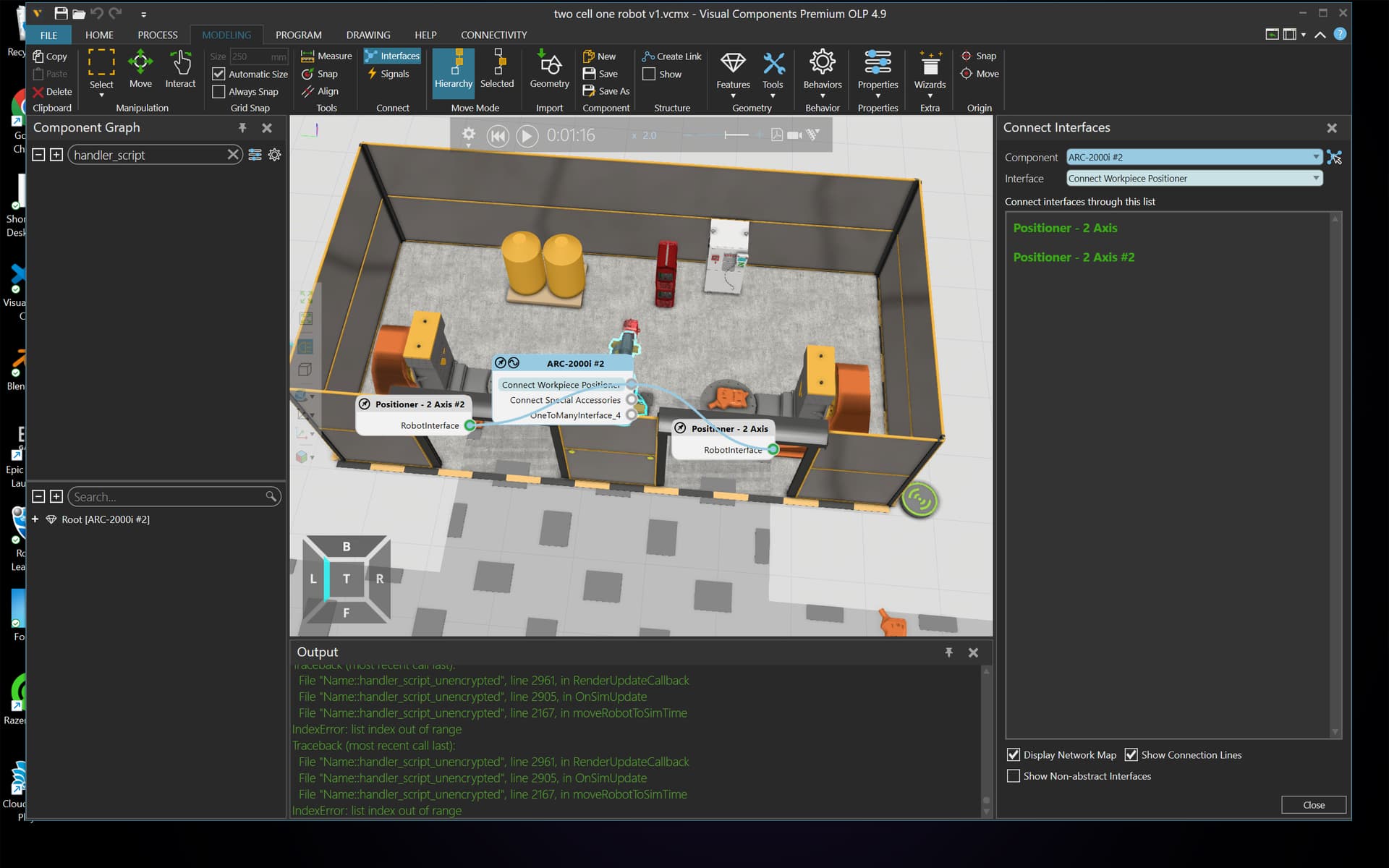
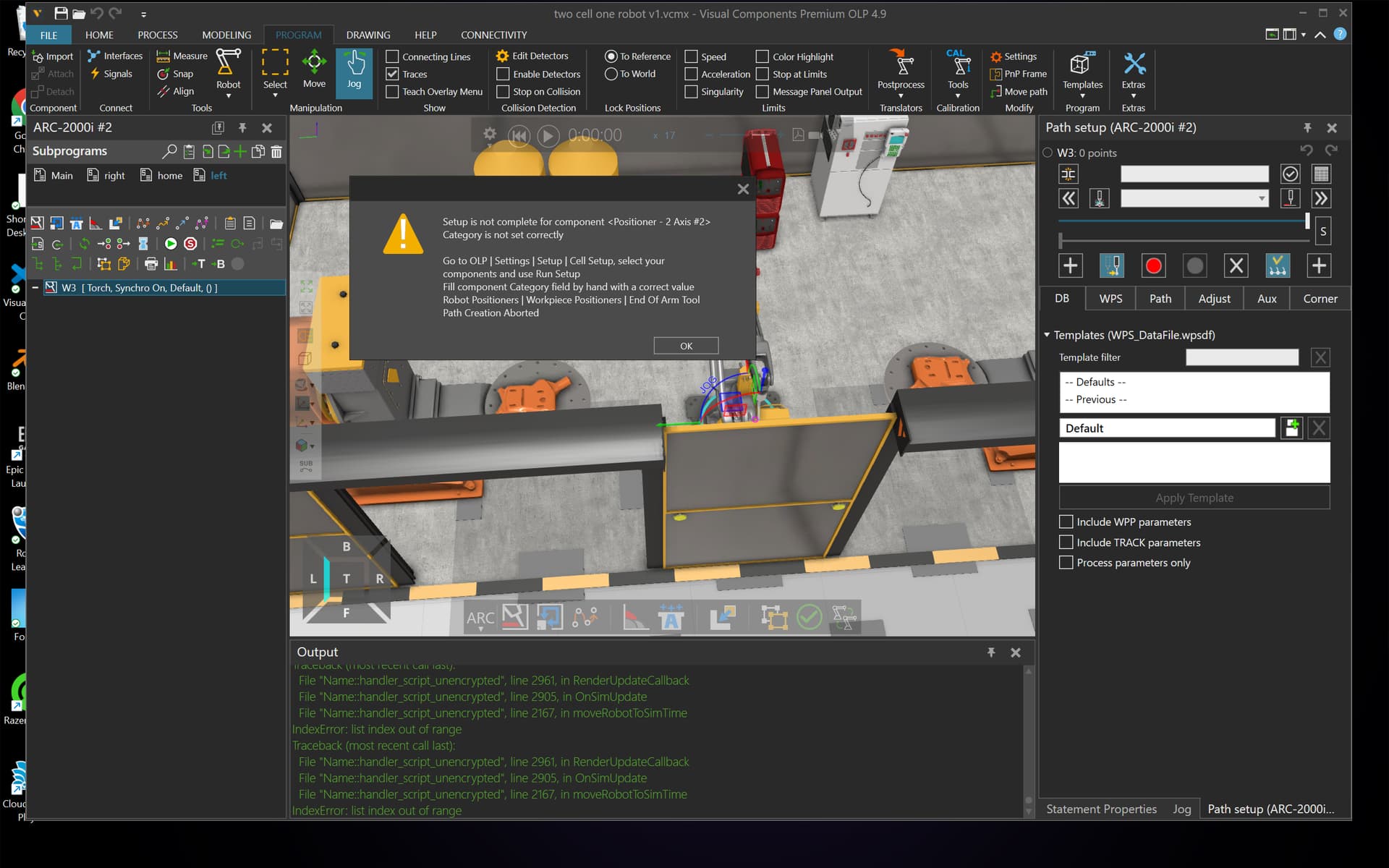
Additionally, I am not able to create any welding programs on any positioner when I link both workpiece positioners in the interface. I receive the following error and using Run Setup did not fix the problem.
I have also attached my file when the right positioner is working and I wish to mirror its operation on the left side. Does anyone know how this could be implemented?
two cell one robot v1.vcmx (16.3 MB)