Hy,
I created an additional tool frame named “CameraSystem” in tool container of robot from eCat and I try to attach it to J5 node but I get an error.
How to handle this cleanly?
Thx & Regards
Hy,
I created an additional tool frame named “CameraSystem” in tool container of robot from eCat and I try to attach it to J5 node but I get an error.
How to handle this cleanly?
Thx & Regards
Tool frame needs to be parented to controller’s flange node or one of its descendants. To be able to parent tool frame to link 5 you would pretty much need to model the robot as 5 axis robot.
I haven’t come across to real 6 axis robot controllers which would allow you to have tool frame configured to a link somewhere in the middle of the robot’s link chain so VC isn’t any different in that sense.
-k
Hy @keke,
hmmm but it would be great to have this as supported possibility! ![]()
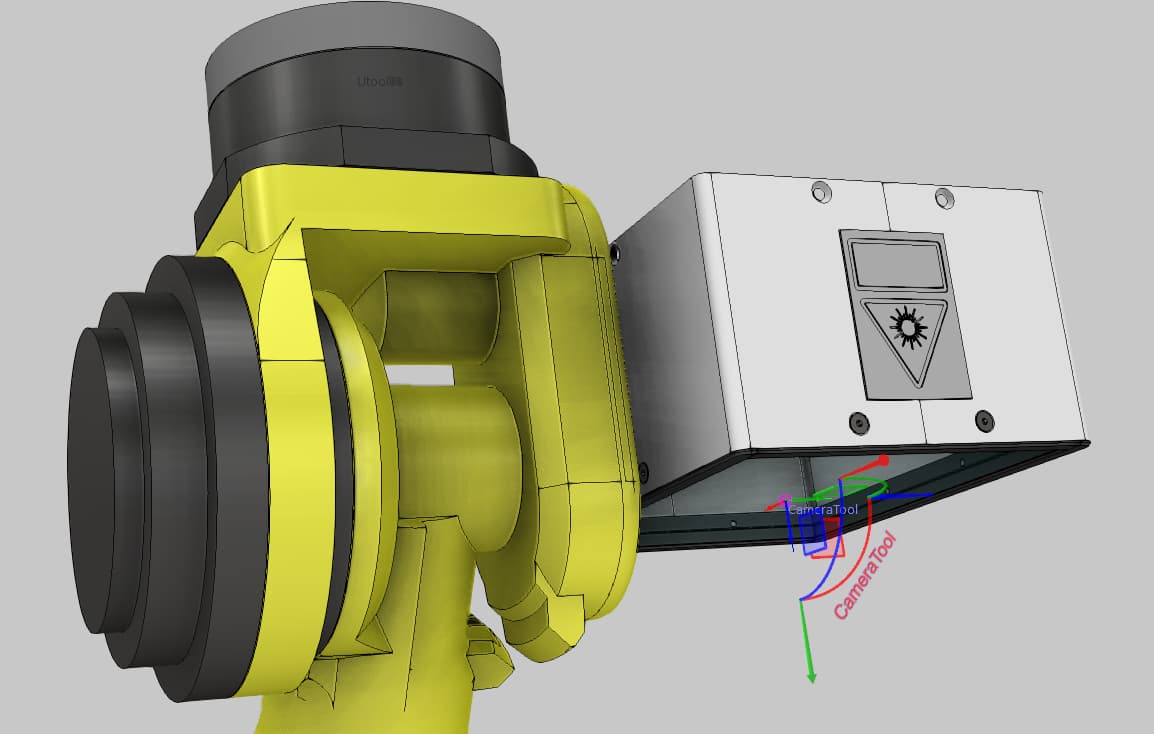
The reason for this is that I want to use VCs awesome programming functionality also cleanly for my camera that I roughly mounted to J5 like:
Would be lovely to be able to work so cleanly in future… ![]()
Thx & Regards
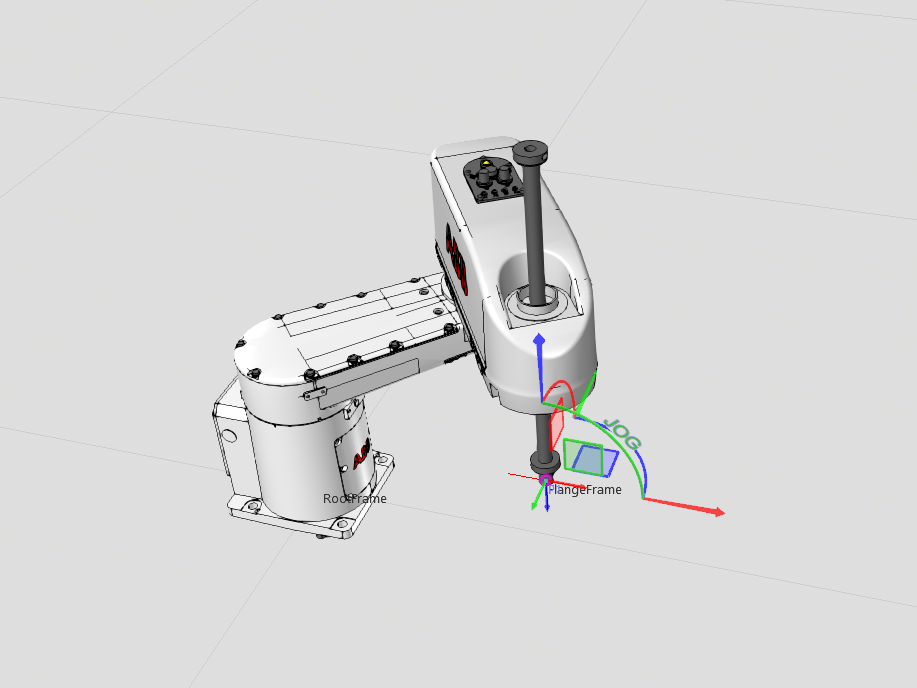
I’m pretty sure that will not be supported. My reasoning is that the kinematic problem (inverse and also forward) change in nature drastically when you drop 1 or more joints at the end. Let’s consider 4 axis scara robot like in the picture below. There I have target matrix within reach and inverse kinematics provides me nice solution where the joints need to be in order to reach it.
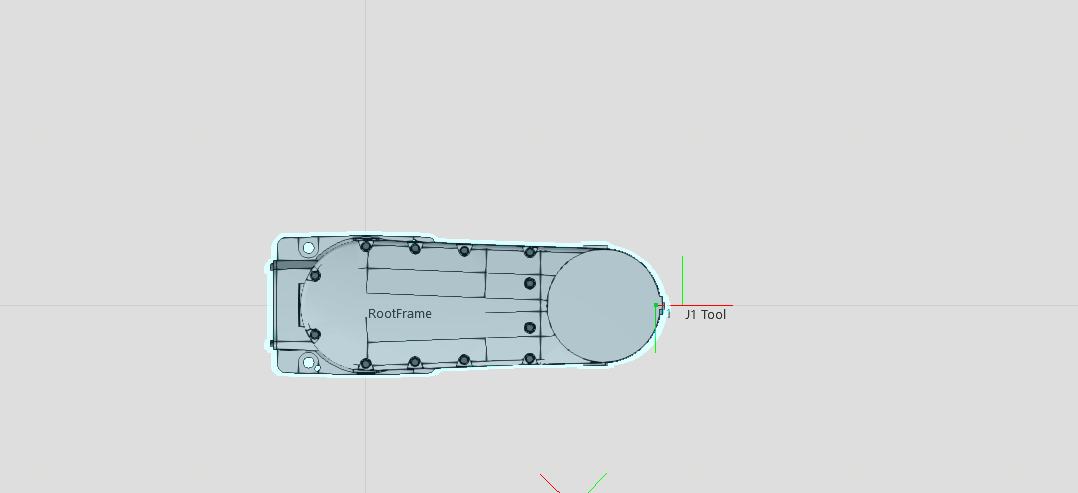
Now let’s assume that we have have this support for defining tool frame in the middle. Let’s parent the tool frame on axis 1 along its X axis. Now if the assumption is that we can use the same kinematics and just somehow ignore unused joints we get the result shown in the following picture. I hid unused joints on the model.
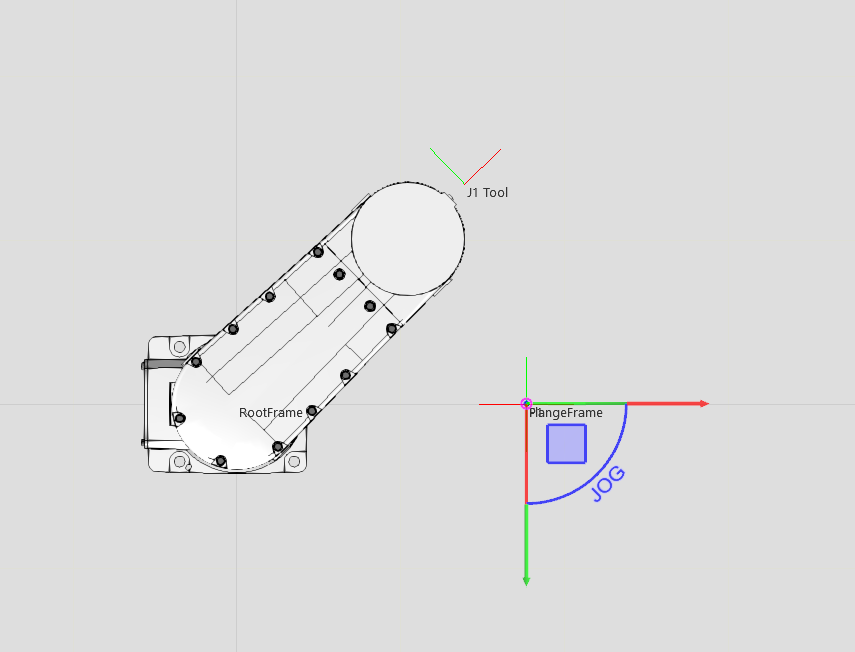
Now is this intuitive and what you were hoping to get with defining tool on axis 1? Probably not and layman would more likely think that of course the tool frame should try to pivot towards to position of the target matrix. Like what’s shown on the following picture.
However this result would need totally different inverse kinematics solver than the regular scara kinematics provide. So yes technically it is possible to write solvers for all of these different setups. But in practice I’d say our devs’ time is better spent elsewhere.
-k
Hy @keke,
thank you for the detailed explanation! I can understand it althought a solution for it would be beautiful…
Thx & Regards
We’ll let’s see about it after we’ve perfected the software on other areas ![]()
Have a nice day!
-k
Sounds great, you too! ![]()