I am trying to do the following:
The vehicle does not stop moving. The robot picks up the product on the Feed and hangs it to the mobile vehicle. Video below
My layout looks like this:
The hanging device is generated by Overhead Conveyor components
Configure the process through the PM process
3.Pick And Place Process components for tracing
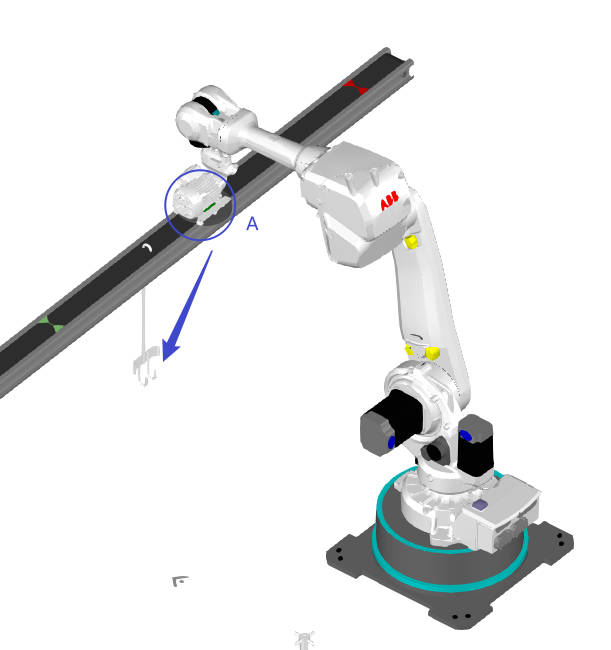
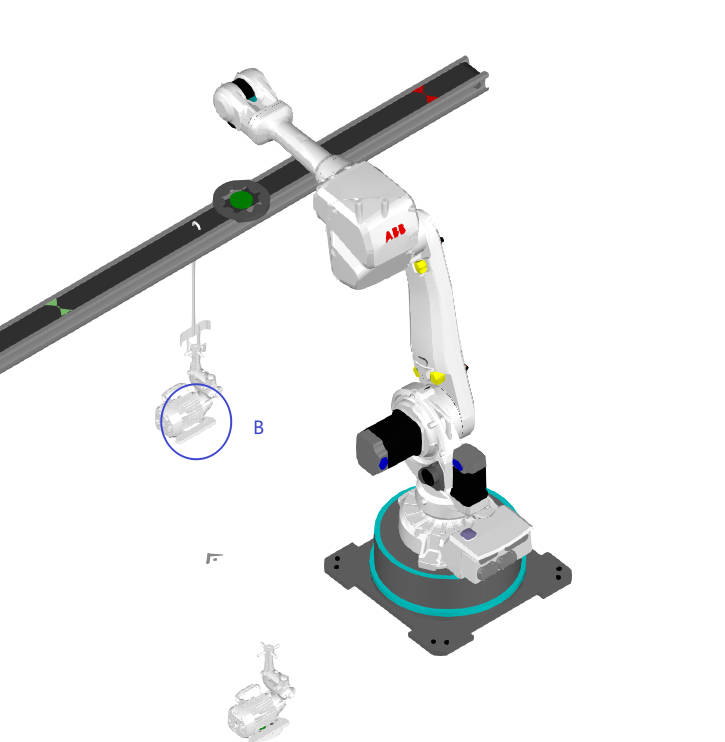
But it turns out that the robot will move the product to point A, and in a flash move it to point B. How to adjust the placement point of the robot to point B? (A is wrong)
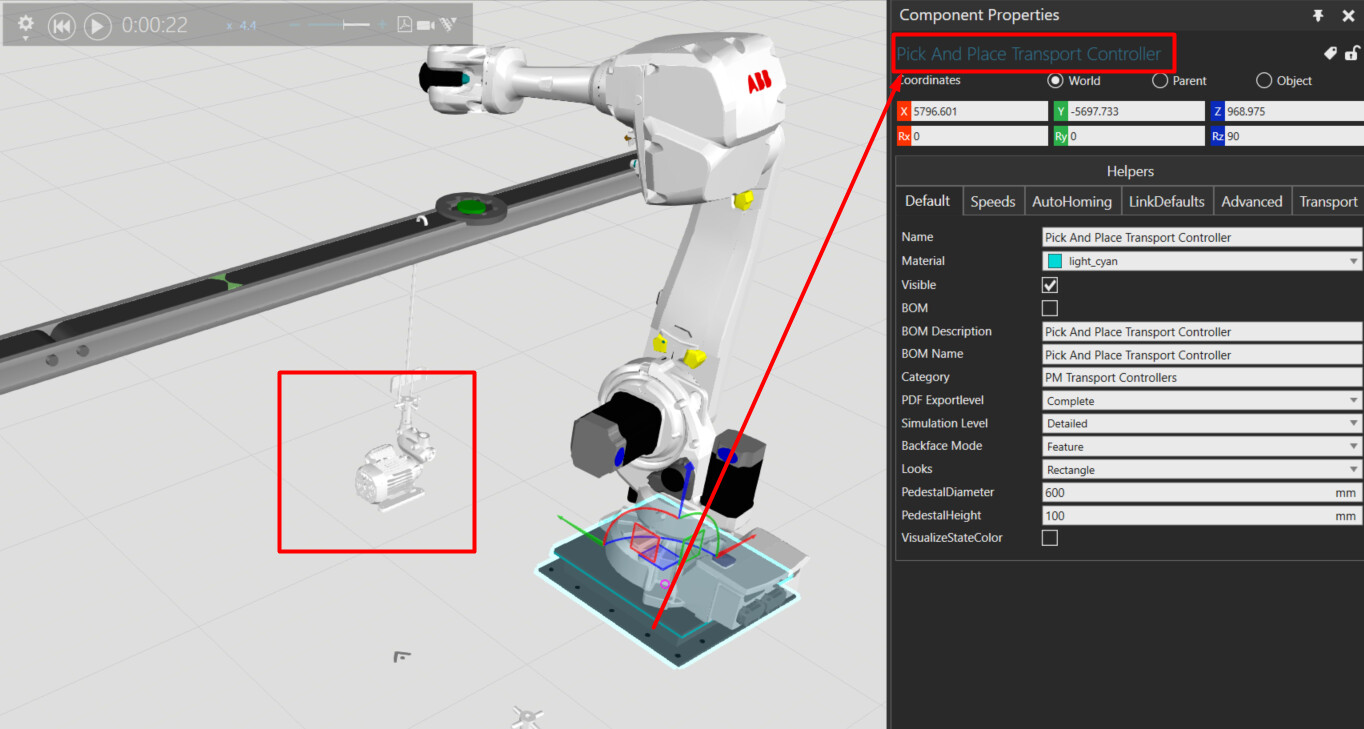
If you use the Pick and Place process, you need to also use the Pick and Place transport controller.
So to fix the issue, replace the robot TC with pick ‘n’ place TC.
I do not know how to solve another problem in use;
In PM, both fetch and place products are automatically identified, but I need to adjust it now;
After taking the product, move it according to the set path, because there are some places to avoid. In the case of full automatic recognition, the robot behaves strangely.
After the execution of the avoidance action, to the designated place to start tracking conveyor line for placement.
After the tracking is finished, return to the origin and wait.
Is there any way you can solve the above description? I’m sure it can be fixed, but maybe I’m missing a feature