
Why can’t uprights be lifted automatically??who can help me?very thanks
PM Robot Palletizing.vcmx (11.6 MB)
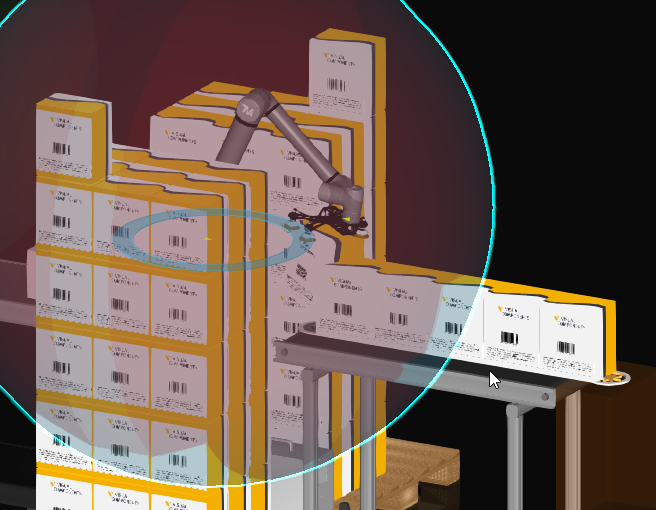
I tested a lot of models and parameters that were still up and down. Even in the range of the robot, the column will rise and fall. I’d like to test the tempo of this palletizer which is very important to me, and who can take a look at it for me? Thank you very much
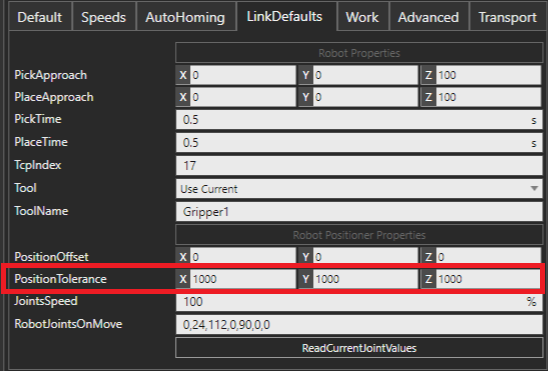
Increase Robot Transport Controller → LinkDefaults::PositionTolerance
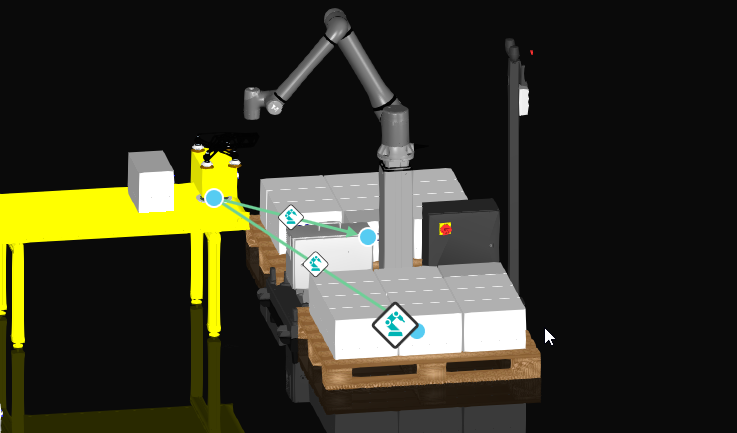
May I ask whether this value refers to the column or how to determine it? I tried it only worked once because my palletizing was relatively high at around 2700mm. The 650mm I set only worked once. If you set it too high, you can’t reach it. I still don’t understand what this number does. Could you explain it in detail? I want to stop in three places to get the best rhythm of my robotic arm.
If you need precise control how the robot moves, you should program it manually in the program tab. It is possible to record the PM generated program to use as a starting point. Not sure if that works with PM assemblies.
If you need to know accurate cycle times, you will need to verify the cycle time with the robot manufacturer’s own simulator or a real robot. The program can be exported (post processed) from VC for this purpose. In this case your robot looks like an Universal Robots robot, so could use the UR Sim software.
I know how to turn into a robot program alone. Because this is the movement of the lifting shaft of the seventh axis. The method given by the god upstairs I debugged several times only worked the first time and then not. In the picture, the incoming material of the conveyor belt has been within the range of the robot but still has to descend to pick up the material
Is it possible to add 3 Robot Transport Controller so that we have to write robot scripts
Robot Transport Controller has default way to move lift, if you have your own way for the lift, like Tsy said, you could teach the robot manually, or you could write your own script for it. Check Robot Transport Controller → ResourceLogic → Class RobotPositioner → Method move, you will see how controller moves the lift.
This is how the techman robot communicates with the VC. How does this brand import and export program who has done it