Hello, is it possible to give a crane an exact path, it is important that it does not travel over an area where people are working.
Unfortunately, you cannot connect the crane controller to a pathway as you can with a forklift or a human.
Do you have any ideas?
Hello, thank you very much for your answer.
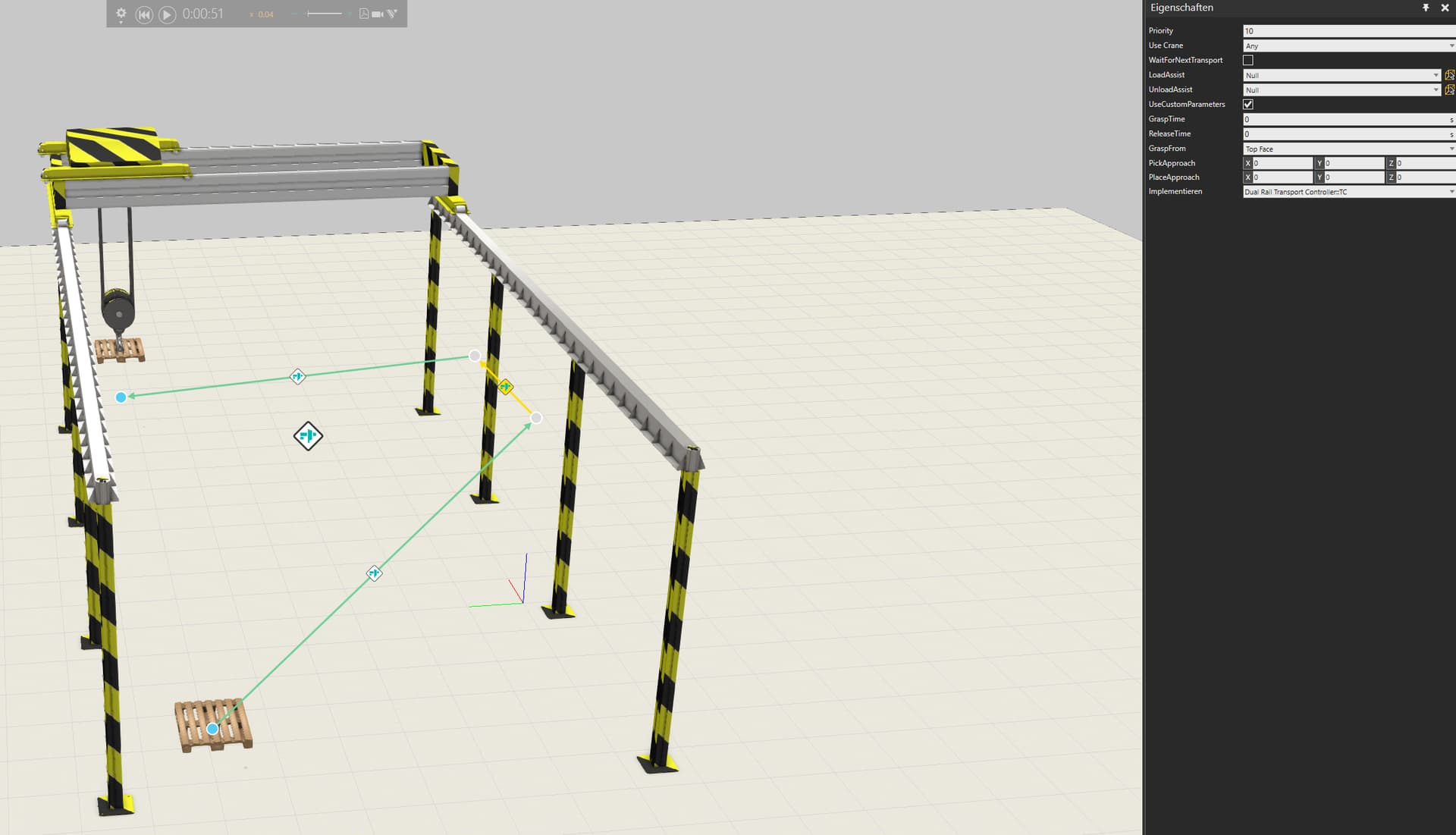
the 2nd option with the transport nodes is exactly what I’m looking for, I have your example nachgbeuat times, my only problem now, however, is still the solve and resume again, can you turn it off completely?
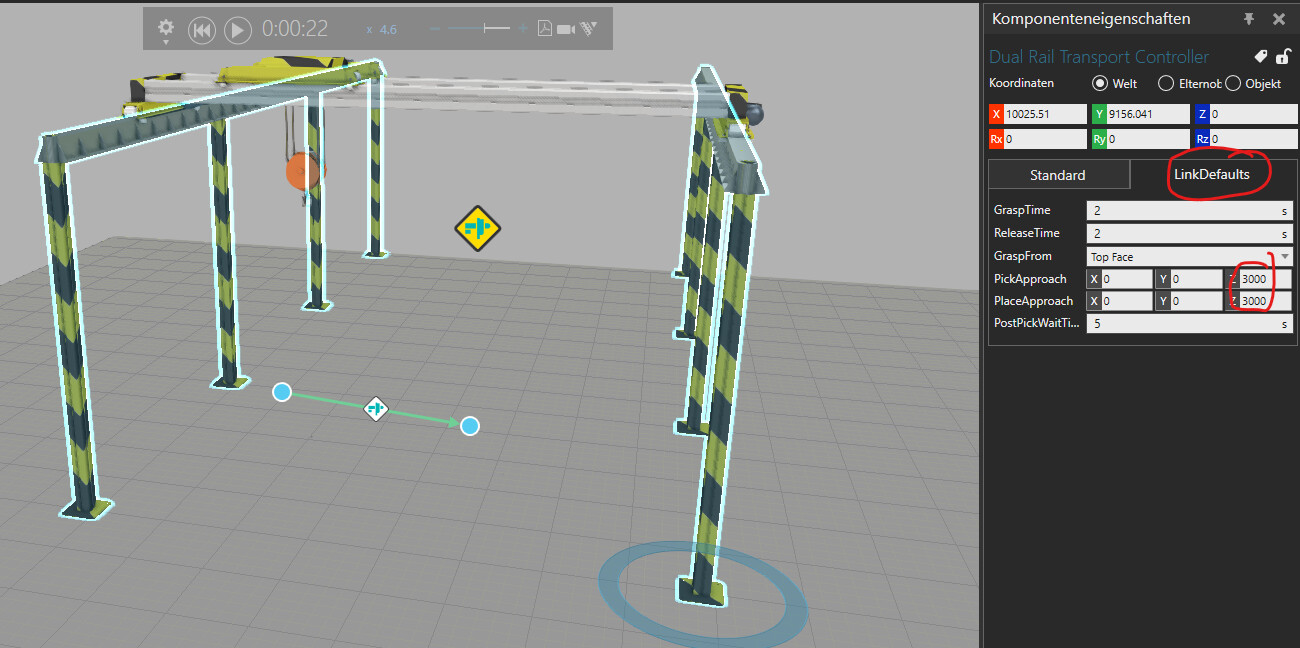
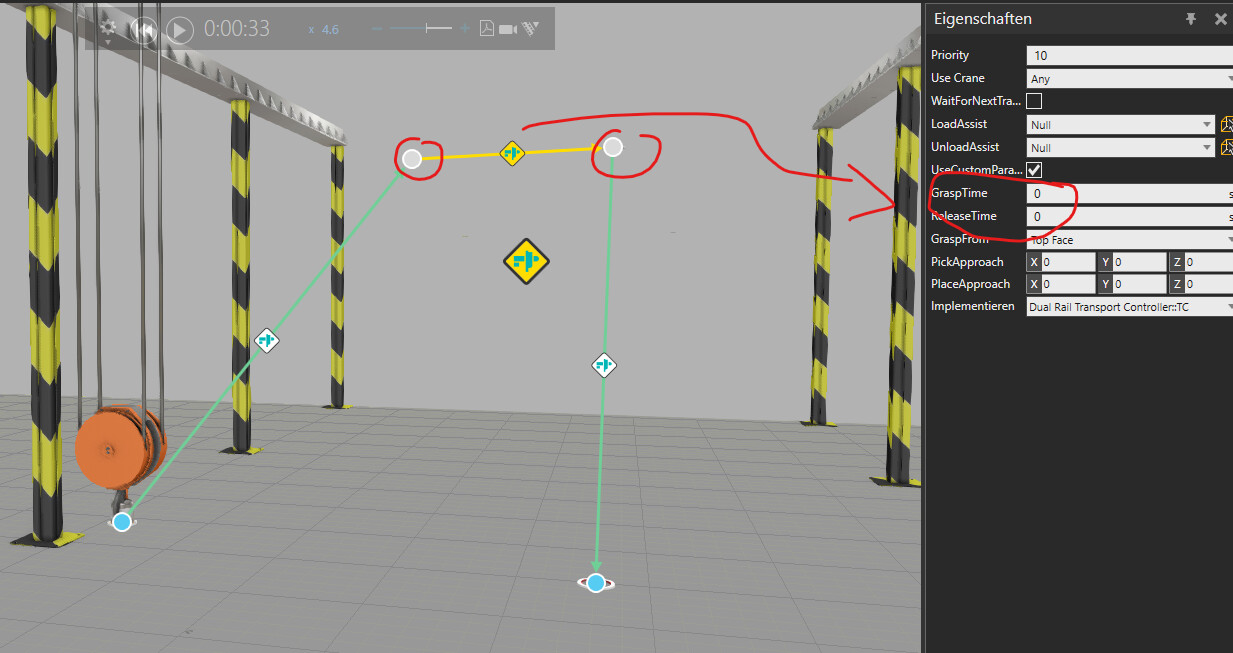
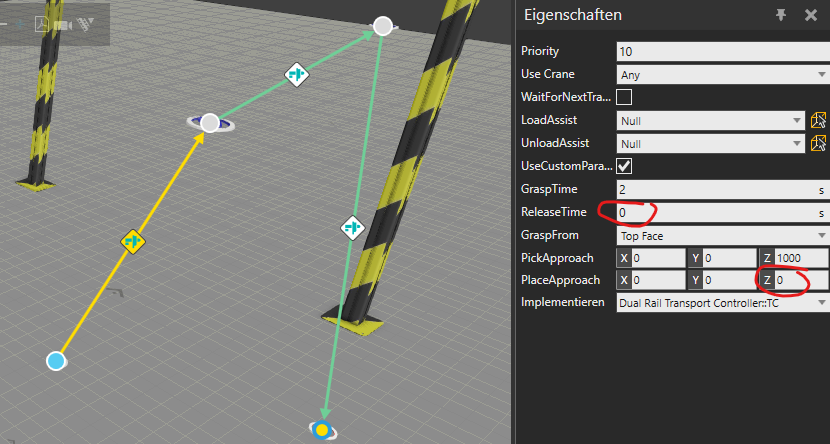
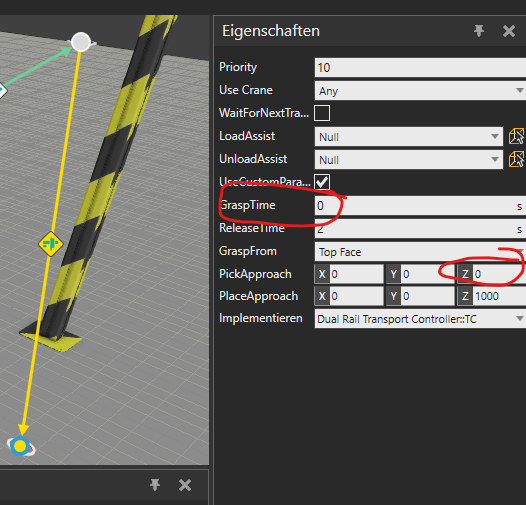
I have set grasp and release to 0, but it doesn’t quite work.
maybe i need to change something in the crane properties?