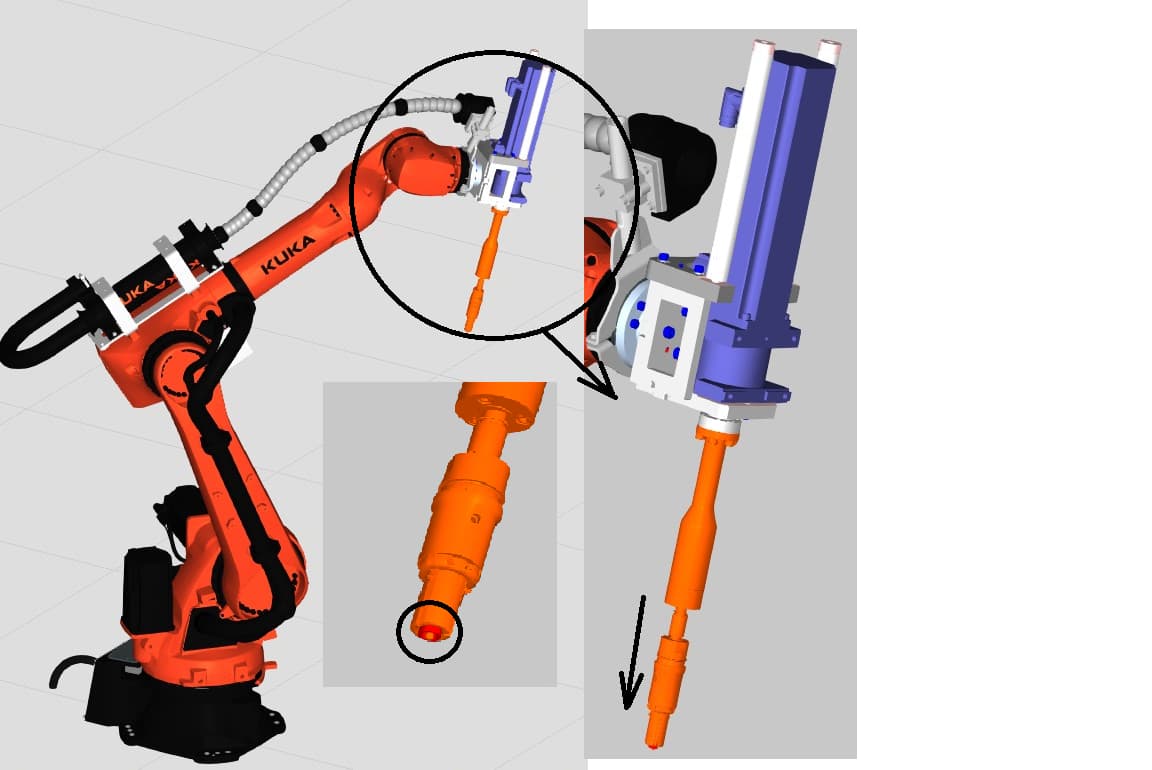
Hey, guys. I need help. I have such a gripper (picture) which performs a linear movement for me. In the gripper there is such a buxa which you should move along with the gripper. And my problem is : When I want to put the buxa in a motor for example, the gripper performs a linear motion and puts the buxa in the motor for example. Only my problem is that the buxa stays in the suck world. I was advised to set up a TCP slave but that didn’t work and when I managed to set it up it threw me an error. Could anyone help me with this. I apologize if I have described my problem wrong. Thank you for your help
1 Like
Hello, if anyone knows, i would need an answer as well.
I’m not sure if this is what you are looking for, but you can move the tool TCP under a moving link and then set the TCP Node as that link. Then the TCP should move when the link moves.

1 Like
Hi thank you for your advice. But it doesn’t work for me. Could it be that I am using KUKA robot?
Thank you
Hi,
You can also perform this with a KUKA Robot in VC KUKA OLP or KUKA.Sim. But you need more that one TCP.
You should use one Tool_Data - without Node with a link - to teach the robot positions. And you can add Tool_Data[y] with a Node to a link to grab and release the part. In-between you can start a translation via a signal to your tool/link. Thereby the simulation will understand that the grasped part will follow Tool_Data[y].
Just remember: There is no “dynamic” TCP in the real KRL world. So this workaround only works in the Simulation. ![]()
1 Like
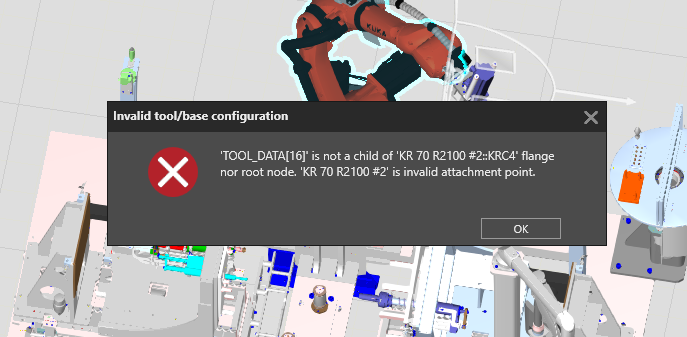
Hey, Chris. Thank you for your advice. I already tried doing this (as you wrote) and it wrote me an error. ![]()
Thank you
Hey,
Can you post the error here? Im wondering why its not working…
Hi yes I’ll show you what error it gave me. But I have one question. When I go to pick up (for example a cube from the table) I have to have the same tool selected as when laying (the cube)
Thank you
Hi @Andrej98
I cannot reproduce the error. Please see the attached Video and .vcmx
And yes, you need to pick up and release the object with the same Tool_Data. In my example its Tool_Data[2] and therefor I can directly use OUT[2]
TCP_slaves.vcmx (16.7 MB)
Hi @ChrisS. Thank you for your advice but it doesn’t work for me ![]() but I guess I have the kinematics wrong .
but I guess I have the kinematics wrong .
Thanks for the help ![]()
1 Like
Hi @ChrisS. I managed to solve my problem. My gripper was badly attached to the robot. A colleague accidentally put it on the 6 axis robot.
Thank you with ![]()
1 Like