Hello,
I would like to see/generate the swept volume (motion volume). Is there any way I can do that either manually or programmatically (Python)?
I am using VC 4.10 Premium OLP
Hello,
I would like to see/generate the swept volume (motion volume). Is there any way I can do that either manually or programmatically (Python)?
I am using VC 4.10 Premium OLP
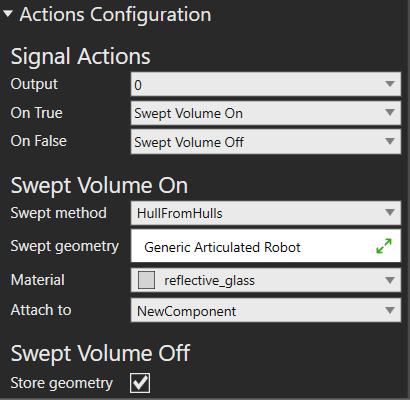
You can directly use OUT[81] in robot programming, when the output value is True, it will automatically generate the sweep body, if you want to leave the body after the simulation, you need to check “Store geometry”.