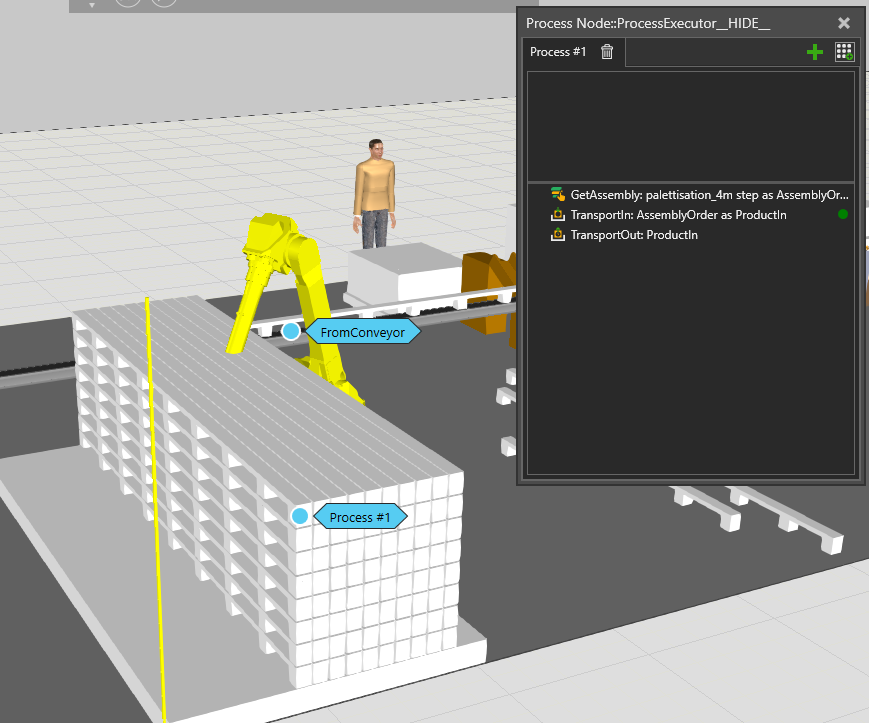
Your process repeats automatically. If your simulation doesn’t need to do anything else after the palletizing is finished, just remove the TransportOut and add a Halt statement.
If you want only this process to run only once you could use either very long delay, or some component property and a Property Condition process requirement statement.
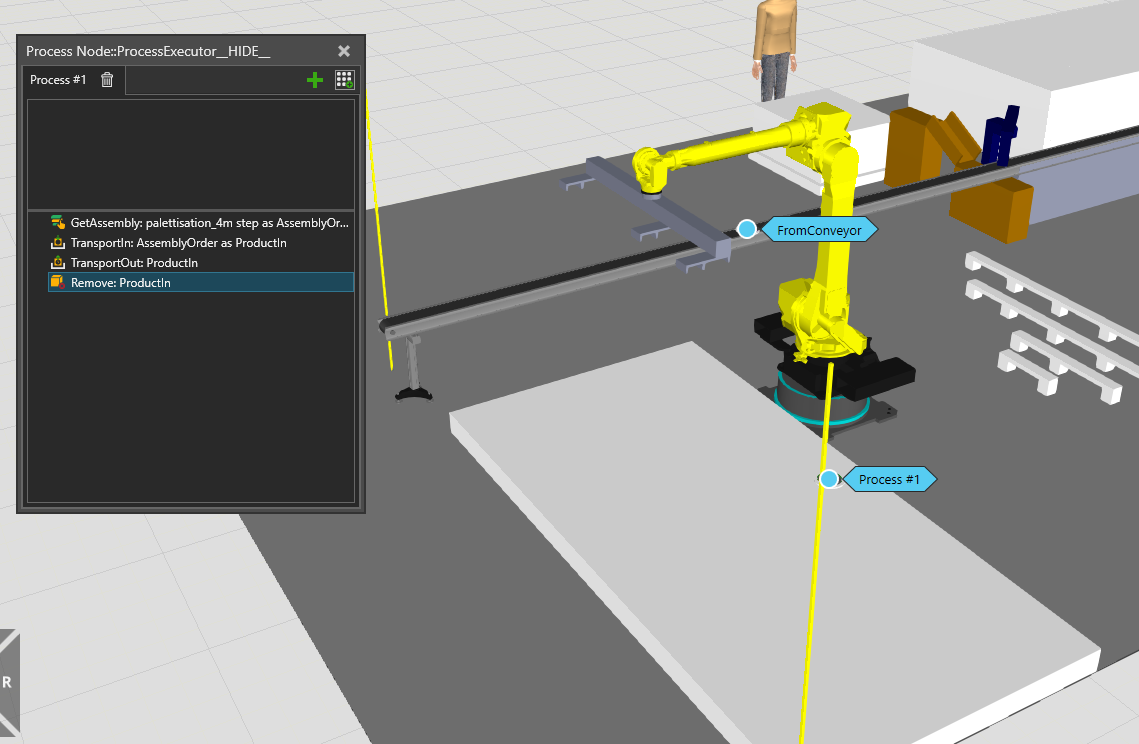
You could also just use a Remove statement to remove the ProductIn you just assembled and start over.