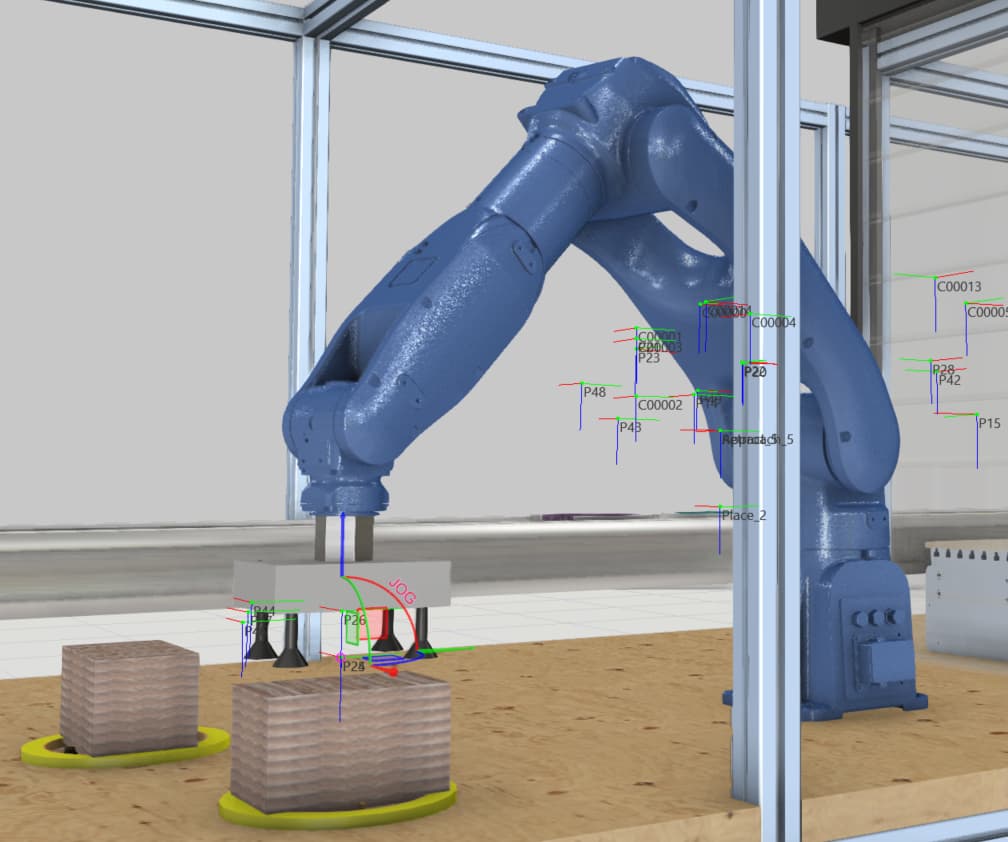
hi, i was wondering if there is any way to make the robot pick the wood piece properly from a stack feeder if im using a custom robot program in my process flow. i can move the frame in the program to pick the first piece properly but then how would i make the robot go a little lower the next time to pick the next pieces properly aswell?
thank you it worked. i used a switch case to determine the base based on the ammount of wood pieces. now im wondering if there is a way that i can link two variables together. i made a new variable in the yaskawa robot and i want to link it to the stack count variable in the feeder so that i dont haveto manually keep changing it.
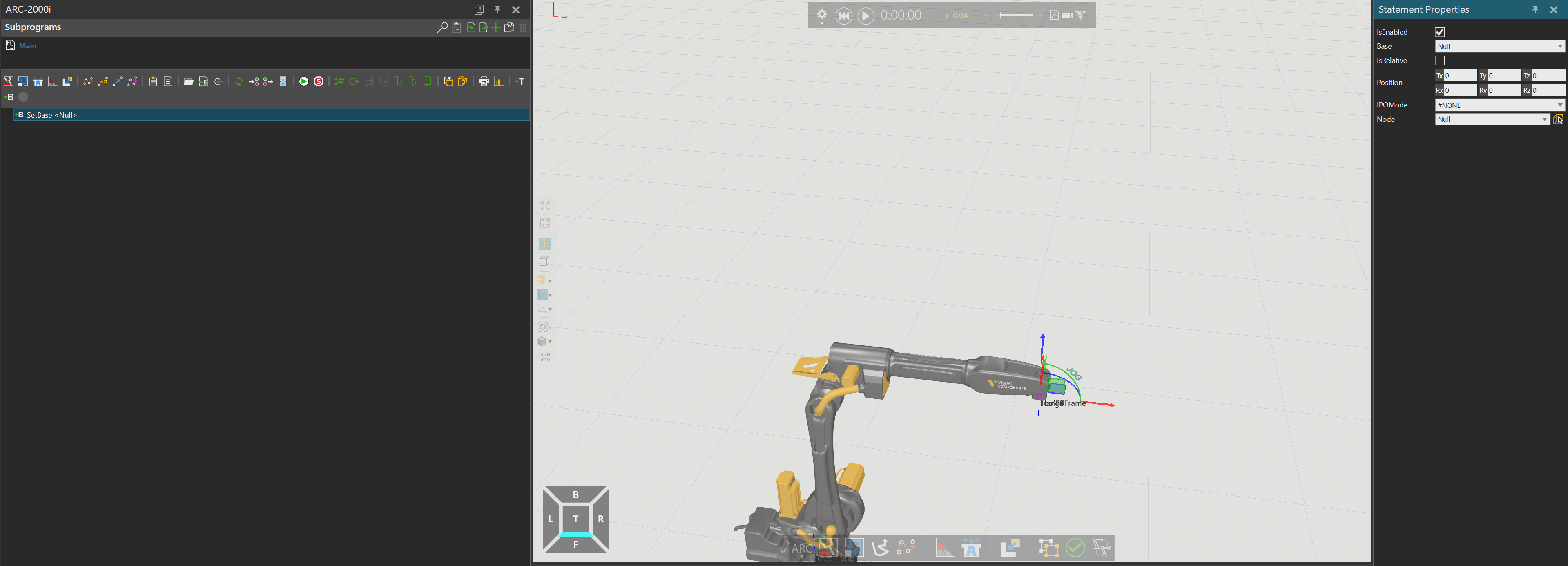
Ok, I can give you a quick demo, but I’m not promising that this is the best solution (in reality, with robots, it is possible to set offset variables, but I don’t know how to do it in VC)
What I did was to make a new empty Link, use the variable I built (MyBase in this case) as the joint variable of the Link, then attach the target base to this link, and just change the variable value when needed.
Of course, as I said, this is not the best way to do it, the best way would be to set the offset variable, which I remember was done, but I kind of forgot (I read so many threads that it’s hard to find them right away) ![]()
demo0303.vcmx (2.7 MB)