Hi there!
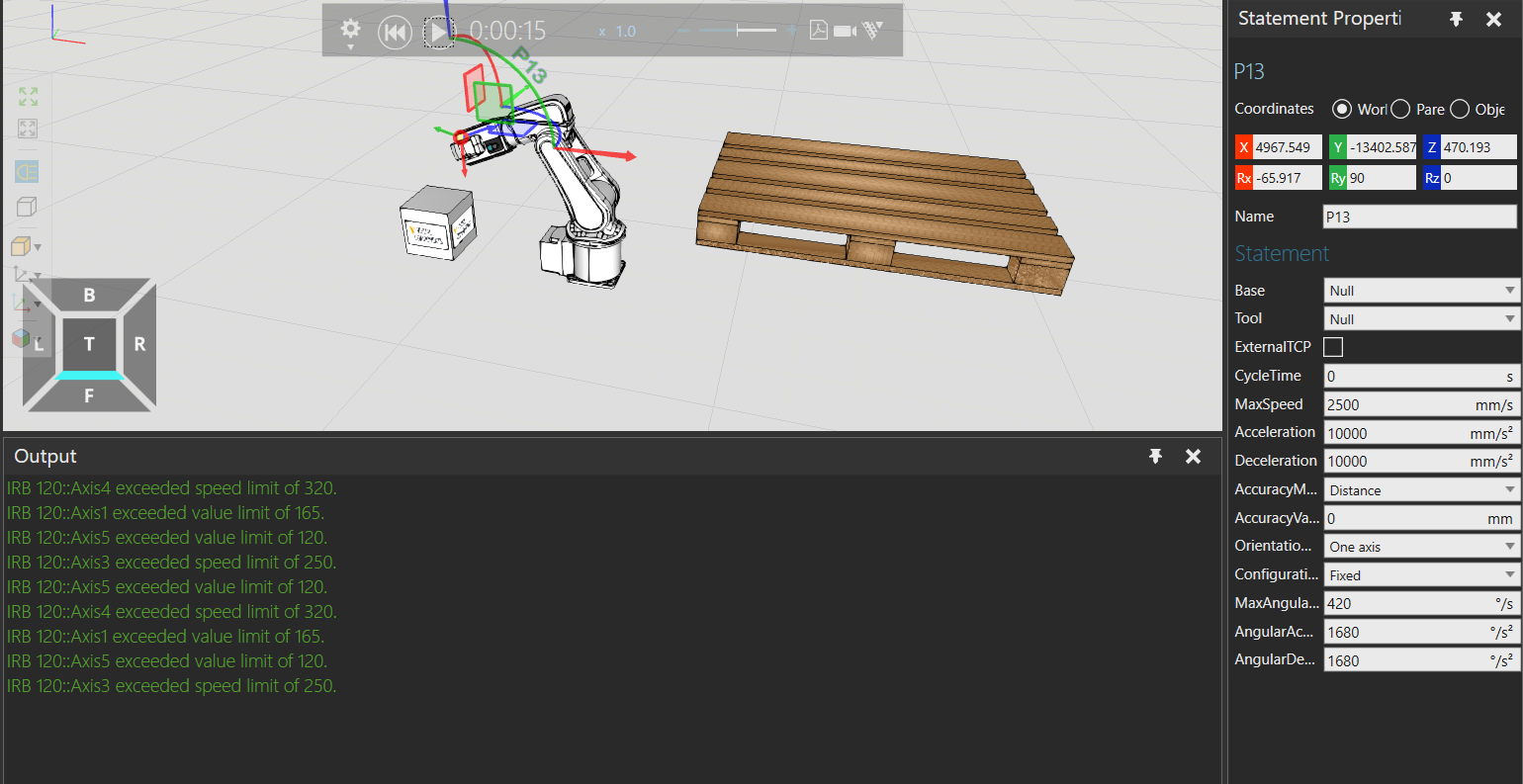
When I am simulating the path of my robot I keep seeing in the output panel that my axes are exceeding their max speed values, specifically, whenever I use the linear motion statement (LIN) to go from point to point.
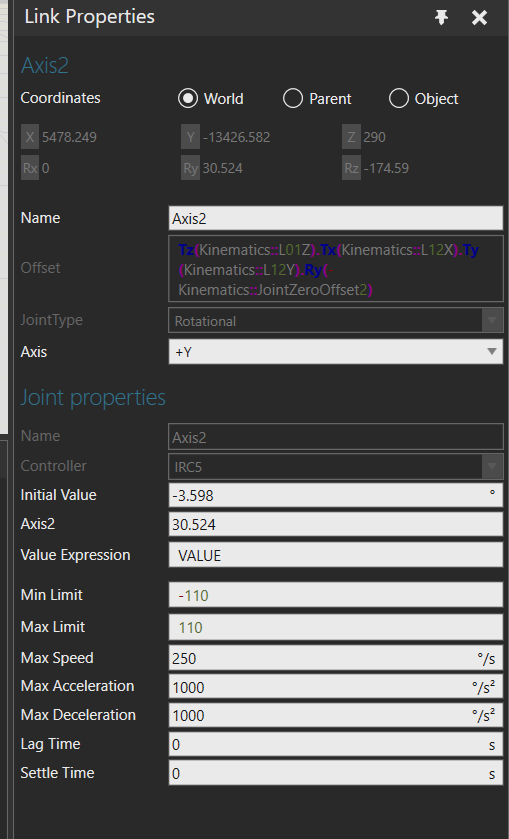
In the modeling tab, I see that in the links of the robot, the speed and acceleration limits are established automatically. I want my axes to move at max speed (but never to exceed it) so I can set the cicle time. Does someone know how this works?
Thanks in advance,