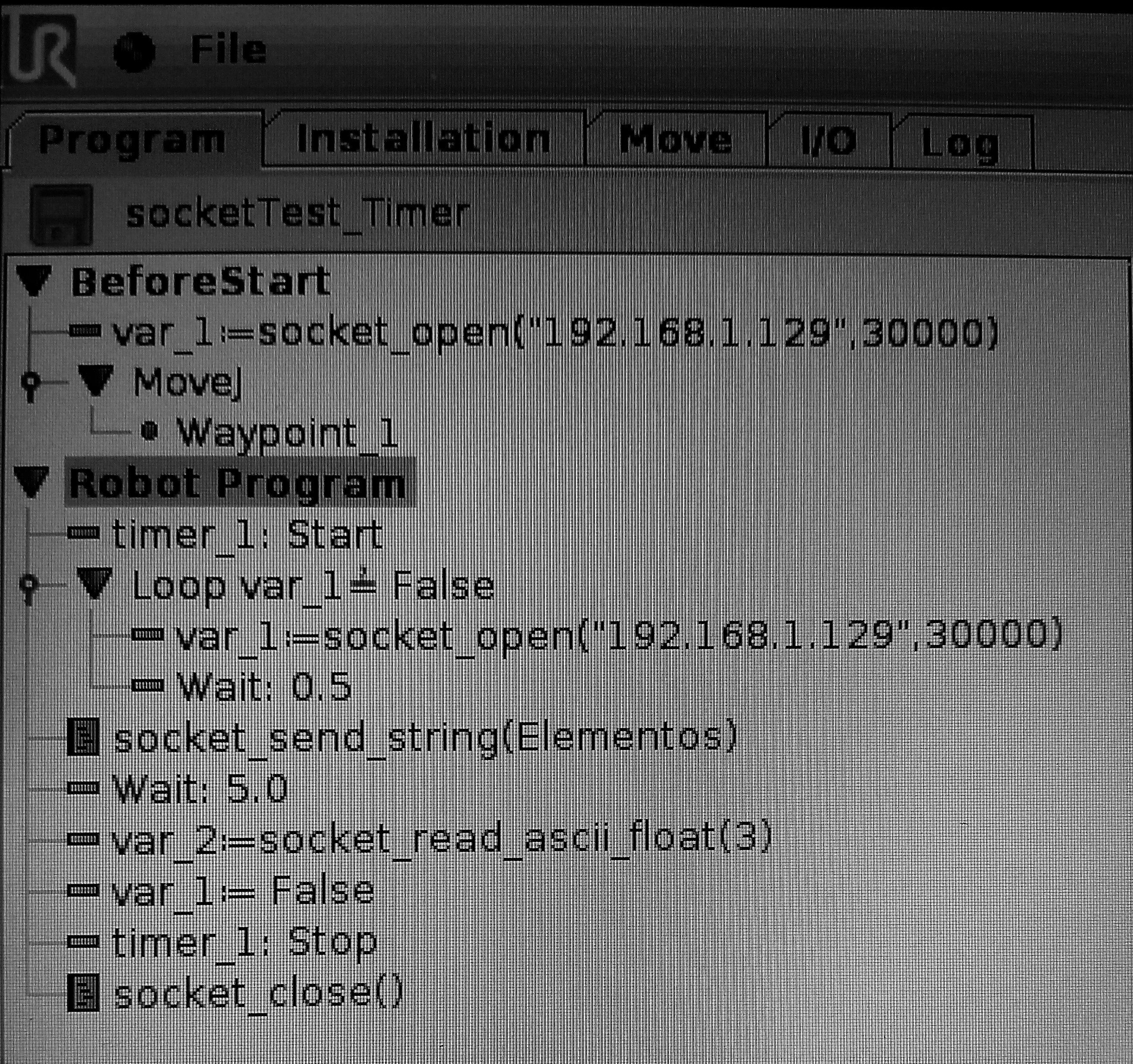
I have a program in the Polyscope3.13 with UR3 CB3 robot, I have a variable ‘Elements’ I am using socket, as seen in the image, with the instruction socket_send_ … (Elements) I send the variable Elements to the PC, I want to use RTDE to communicate, the problem I have is I don’t know in which variable I can receive ‘Elements’ in the visual components
The UR RTDE is its own specific protocol, you can’t just use your custom socket communication with it.
You could create a socket connection on VC side using Python scripting. Search this forum for an example how to do that.
hi, again, the project I have is to create a digital twin with a UR3, I have the robot movements, and I want to obtain the value of the UR3 variables, variables such as TIMERs or Internal Variables defined by the programmer, maybe some idea of how can I get those variables
Copy the values to general purpose output (or input) registers using a script in UR and then you can read or write them using the VC’s UR RTDE connection.
Thanks, for your answer, I am trying to write write_port_register(1,50) for write value=50 in register `01, but return error, please can you explain how do you do that in polyscope UR
Use the functions shown here on pages 85-87. Note that all registers might not be available in the RTDE interface because some were added after the version 1 of the interface the VC supports.