I would recommend to do this with an assembly in process modeling.
why doesn’t this work in your layout, do you want to share it or what is the message in the output? some error message?
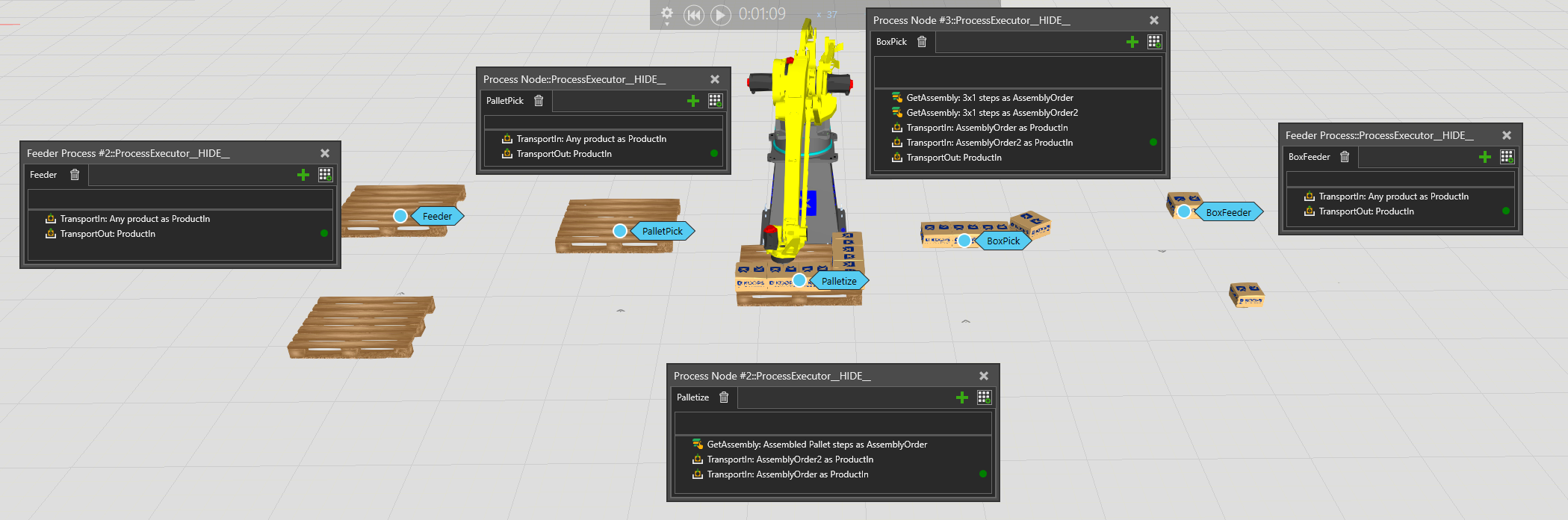
I managed to get something that kind of works using multigrasp on the robot and capacity 2 on the robot controller. Right now its just picking the 6 boxes 3 ontop of 3.
I have an assembly of 3 boxes.
Ive got another assembly where step 1 is bringing in a pallet, and then step 2 is the pallet positions that take up the volume of the 3 boxes.
Is it possible to use this approach with a large gripper with multiple TCPs?
I’m still trying to get a grasp on assemblies, and spoke with someone from VC yesterday that helped me understand a bit more and provided a layout template to reference. I’ve got to try to create something that can palletize by picking up 4 or 6 parts in one action, and dropping them to different points on the pallet, such as 3 in one row, and 3 on another row, or 3, 2, 1 in different positions.