Hello there,
Does anyone have an idea about connecting the I/O signals from the URSim to the VC simulation. What kind of variables need to be paired in server to simulation for the connection?
Thank you!
Hello there,
Does anyone have an idea about connecting the I/O signals from the URSim to the VC simulation. What kind of variables need to be paired in server to simulation for the connection?
Thank you!
If you are using Visual Components Premium, open the Help file, and then go to Tasks > Connectivity and find the topic on RTDE plugin for UR Sim. It provides a list of supported data types and known issues.
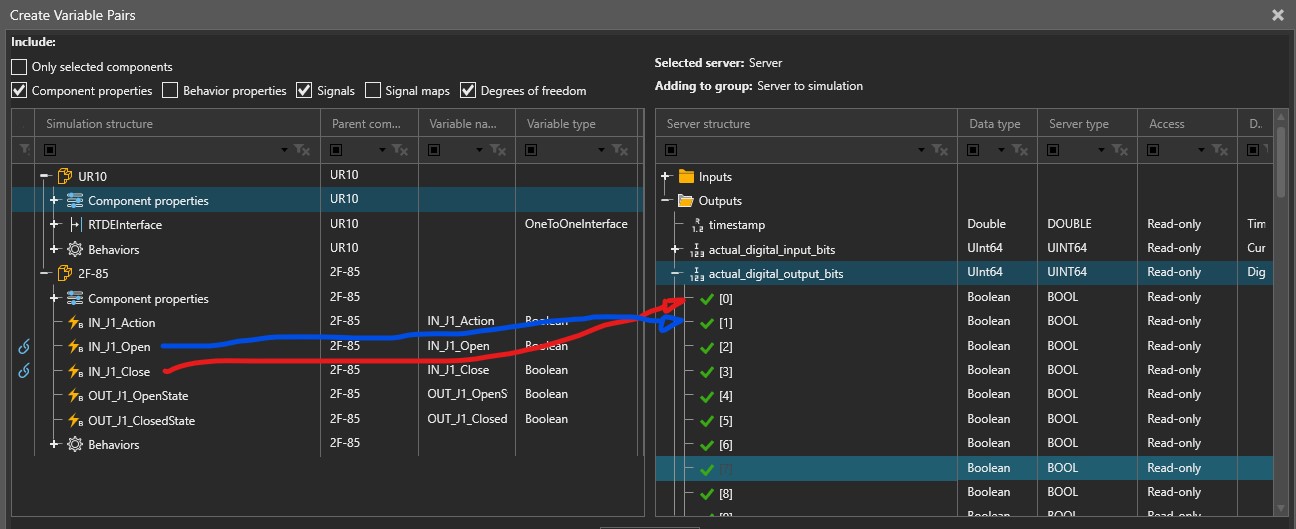
Here is my configuration:
I’ll use URsim to open and close Robotiq 2f-85 fingers in the beginning of my program.
My program starts with:
Set DO[1]=On
Wait: 2.0
Set DO[1]=Off
Set DO[0]=On
Wait: 2.0
Set DO[0]=Off
From VC simulation side I have paired 2f-85 controll signals to UR server actual_digital_output_bits

Now in the begging of my UR-program VC model will open grippers fingers and then close them.
Hope this helps!
thanks for sharing that. I m curious can we send input signal from Visual Components to Universal Robot ? I have tried to send input signal of End Block, but İ cant send. if it is possible, can you show me how to match signals each program like your sharing before?
The UR controller doesn’t allow you to override (write) the actual inputs through the RTDE interface, and as far as I know not any interface for that matter.
However, you can write the “general purpose input register” variables.
hello TSy,
I just want to read input signal from VC in UR side.
as far as ı know is possible to read input register from VC. I have also tried to read but I cant read input signal why ı dont know. I have also mapped any input boolean signal by VC to an input register on the UR side. does someone know this issue.