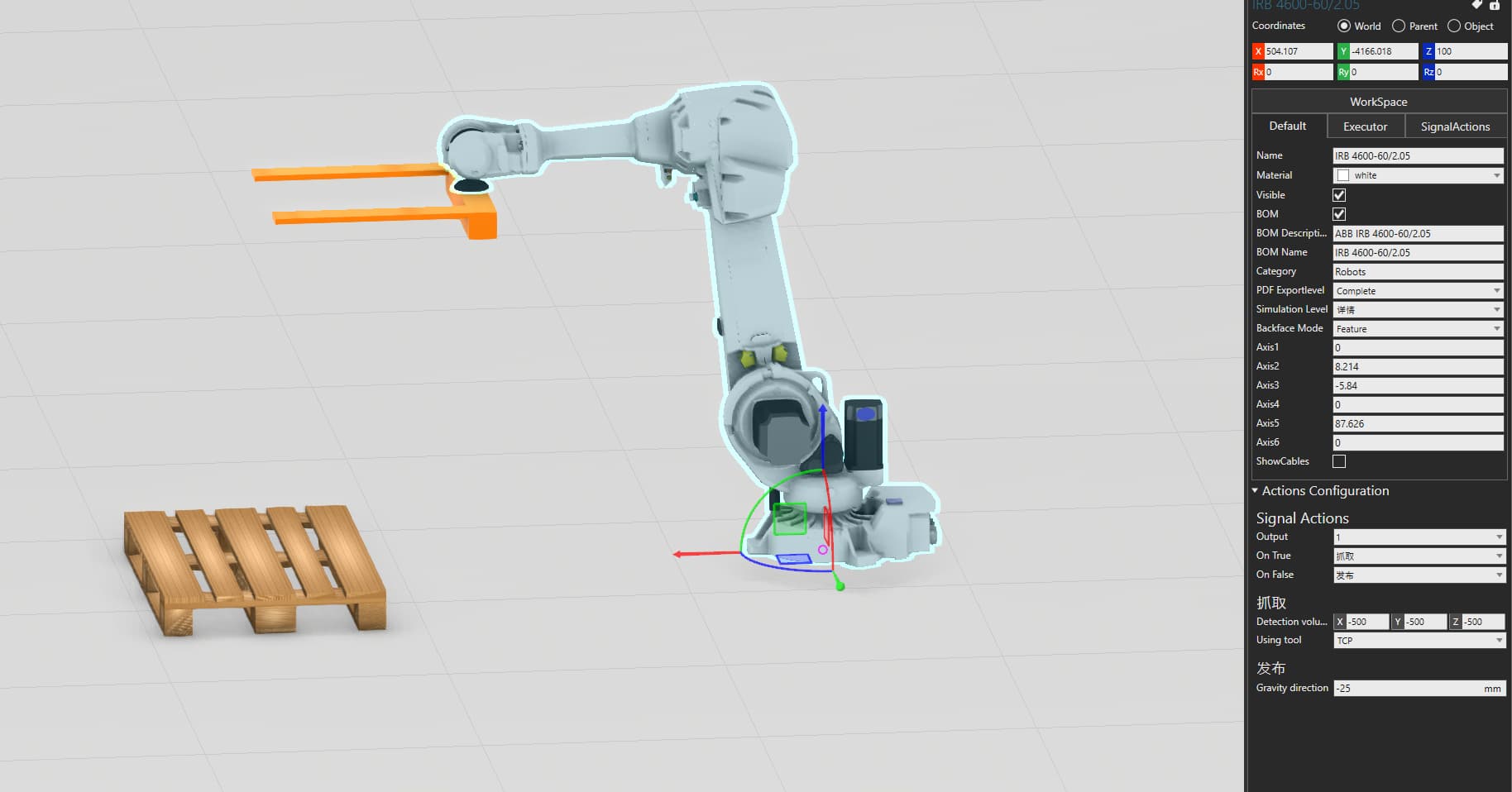
I am new to Visual Components. I was assigned a process for my project that includes lifting up pallets. I have to use a tool imported externally. It is a fork tool (like one on a fork lift). I have tried my best but have not figured out what to do in order to simulate a lifting action, as normally the fork will move through the pallet. I wonder if there is a function to attach the fork to the pallet like the grasp signal in normal robot (I have tried to trigger the signal but it does not work).
Maybe you need to add component container on to that fork tool. Then add frame and raycast sensor so you can identify that pallet. Then just grab the object(pallet) on to the forks container.
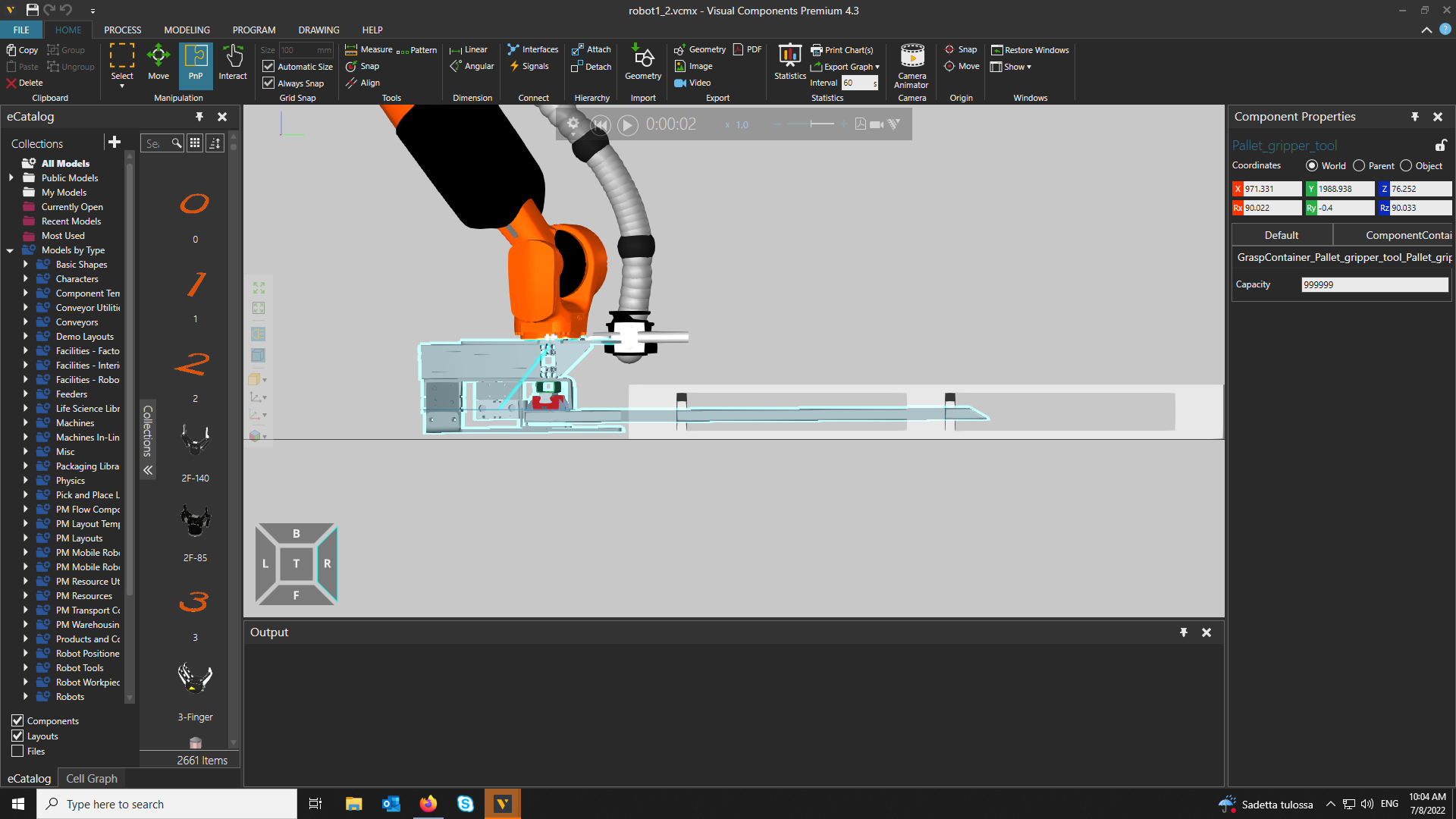
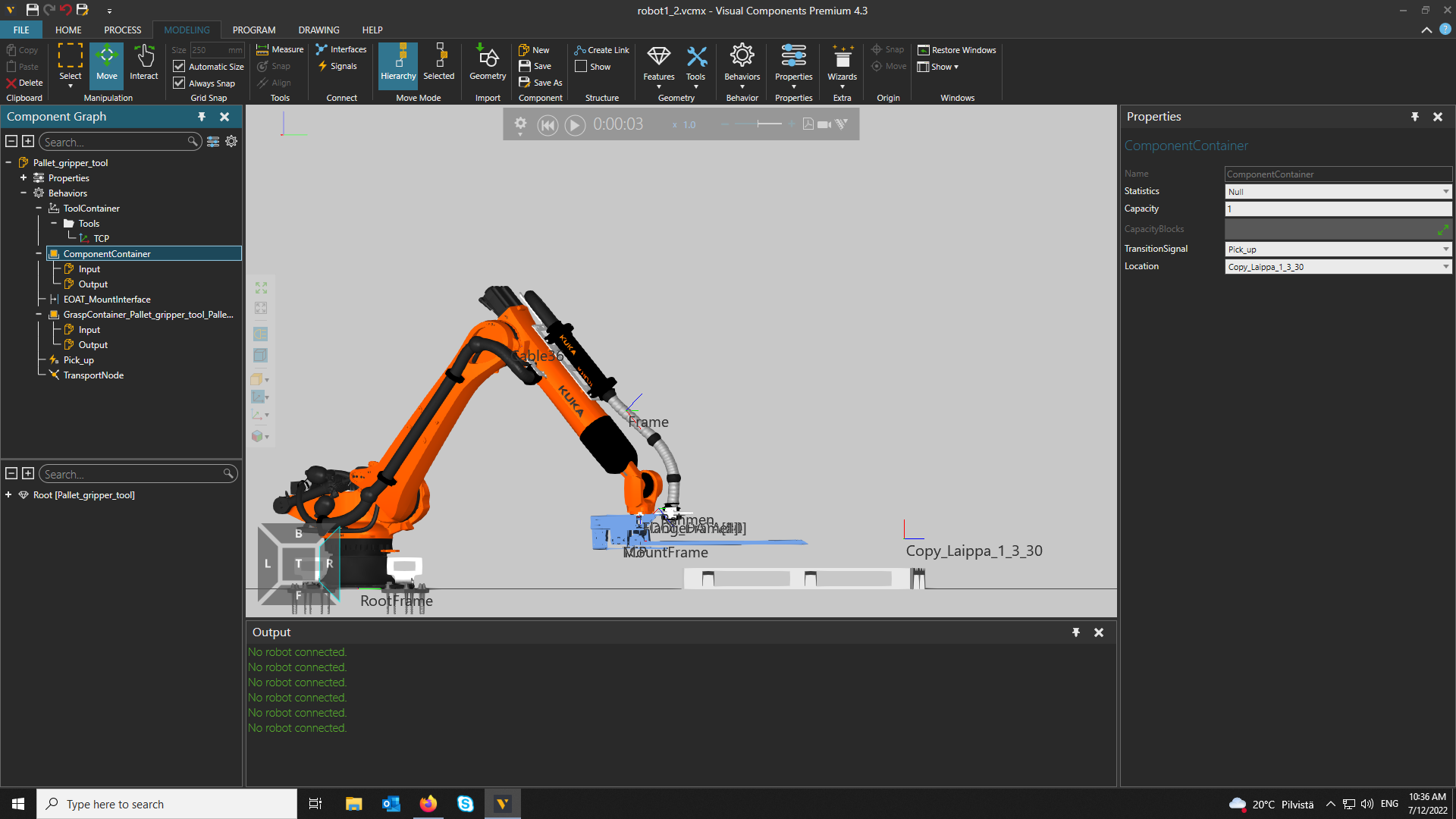
Thanks a lot for your advice. I have added the component container behavior to the tool but it seems there is nothing I can modify (picture below). And can you tell me more about grabbing the object(pallet) on to the forks container. I do not understand fully.
Thank you so much.
When you add script. and get the sensor on place so it identifyes the pallet with component signal then you can use
signal=comp.findBehaviour(“RaycastCompSignal”)
pallet=signal.Value
container.grab(pallet)
I will take more time researching the script. However, as I see, the raycast sensor is much more like a behavior than an actual sensor. Is there any problem with this?
You need to add frame to the fork where you can place the sensor. Sampling time on raycast sensor causes the model to run slow so maybe setting it to 0.1 rather than 0.01.